


INS – 慣性航法システム
慣性航法システム(INS: Inertial Navigation System)は、ロール、ピッチ、ヘディングに加え、位置や速度を提供する航法装置です。この高度なテクノロジーは、外部の基準信号に依存せずに、物体の位置・姿勢・速度を算出します。
自己完結型の航法システムであるINSは、航空宇宙・防衛分野をはじめ、ロボティクスや自律走行など、幅広い分野で重要な役割を果たしています。
慣性航法システム(INS)とは?
慣性航法システム(INS)は、物体の初期位置を基準に、モーションセンサーを用いて位置、速度、姿勢を算出する航法技術です。GPSのような衛星測位システムとは異なり、INS は外部信号に依存せず、内部センサーによって時間経過に伴う運動の変化を追跡します。そのため、外部信号が利用できない、または信頼できない環境下でも高い有効性を発揮します。
主な特徴
1 – 自己完結型: 外部の航法支援に依存せずに動作するため、衛星信号が届きにくい、または利用できない場所でも使用可能です。
2 – 高精度: モーションセンサーから得られるデータを統合し、位置と姿勢を高精度に算出します。
3 – リアルタイム性: 物体の位置と姿勢を継続的に更新できるため、動的で変化の激しい環境下で特に有効です。
INSを支える技術
慣性航法システム(INS)は、正確な航法データを提供するために、いくつかのコア技術に依存しています。これらの技術には、高度なセンサーと計算アルゴリズムが含まれ、物体の動きを追跡するために連携して動作します。以下に、INSで使用される主要技術を詳しく紹介します。
1-ジャイロスコープ
ジャイロスコープはINSの重要なコンポーネントであり、異なる軸周りの角速度(回転率)を計測するために使用されます。
- リングレーザー式ジャイロ(RLG):レーザー光を利用して高精度に回転を測定します。RLGは低ドリフトかつ長期安定性に優れることで知られています。
光ファイバー式ジャイロ(FOG):光ファイバーを通る光の干渉を利用して回転運動を測定します。FOGは、卓越した精度と偏差の安定性が高いことが特徴です。
2 – 加速度計
加速度計は異なる軸方向の加速度を計測し、ジャイロスコープと連携して速度や姿勢の変化を算出します。
- マイクロ電気機械システム(MEMS)加速度計は、小型で低コスト、多くのINSアプリケーションで信頼性の高い性能を提供します。
- 精度と安定性に優れたタイプは、特に高精度が求められるINSで重要な役割を果たします。
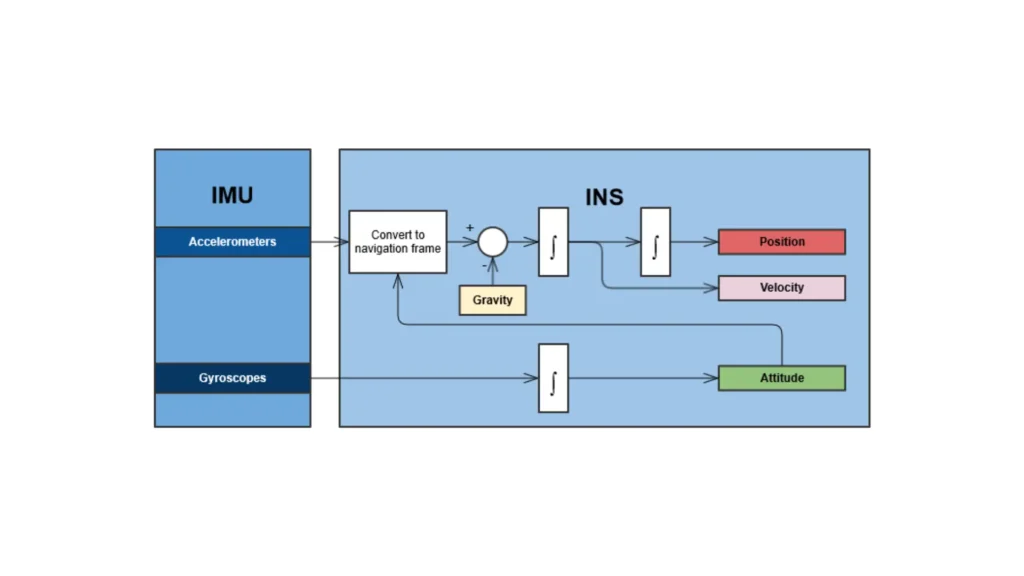
3 – 計算アルゴリズム
計算アルゴリズムは、ジャイロスコープと加速度計から得られるデータを処理し、位置、速度、姿勢を算出します。
- 積分アルゴリズム:加速度データを時間積分して速度や位置を算出します。初期条件を考慮しつつ、航法データを継続的に更新します。
- 誤差補正アルゴリズム:センサー測定に生じるバイアスやドリフトを補正し、精度と信頼性を向上させます。
INSの応用例
慣性航法システム(INS)は、正確な航法・位置決めが求められるさまざまな産業や用途で活用されています。以下に代表的な例をご紹介します。
航空宇宙産業では、INSは航空機の航法において正確なデータを提供します。特にGPS信号が弱い、または利用できない飛行フェーズで重要です。さらに、人工衛星の位置決めや惑星間ミッションを含む宇宙船の航法・制御にも貢献します。
防衛・軍事分野では、INSはミサイルの正確な誘導や標的攻撃に不可欠で、効果的かつ信頼性の高い作戦を支えます。また、戦車や装甲車両などの陸上軍用車両の航法や運用効率の向上にも寄与します。当社の製品は、MIL-STD-461、MIL-STD-1275、MIL-STD-810規格に準拠しており、輸出制限もなく、多くのSBG Systems製品はITAR Freeです。
自律走行車両分野では、INSは自動運転車に必要な航法データを提供し、GPS信号が不十分な環境でも正確な位置・姿勢を維持できるように支援します。さらに、ドローンの正確な飛行制御や航法を支援し、さまざまな条件下で安定した運用を可能にします。
ロボティクス分野では、INSは産業用自動化や探査タスクなど複雑な環境での航法を支援します。また、監視・点検用ロボットが正確な位置制御と動作制御を維持することを可能にします。
慣性航法システム(INS)は、現代の航法・測位技術において重要な役割を果たしています。外部参照に依存せず、正確で信頼性の高いデータを提供します。
ジャイロスコープ、加速度計、計算アルゴリズムなどの先進技術を用いて、位置・速度・姿勢を継続的に更新します。
INSは、航空宇宙、防衛、自律走行車両、ロボティクスなど、さまざまな産業で活用されており、日常から高度なミッションまで幅広い用途でその汎用性を発揮しています。
今後も技術の進歩に伴い、INSの性能と応用範囲は拡大し続け、変化する航法・測位のニーズに応えていくでしょう。
