Inertial Measurement Units (IMU) sind grundlegende Komponenten in modernen Navigations- und Bewegungsverfolgungssystemen.
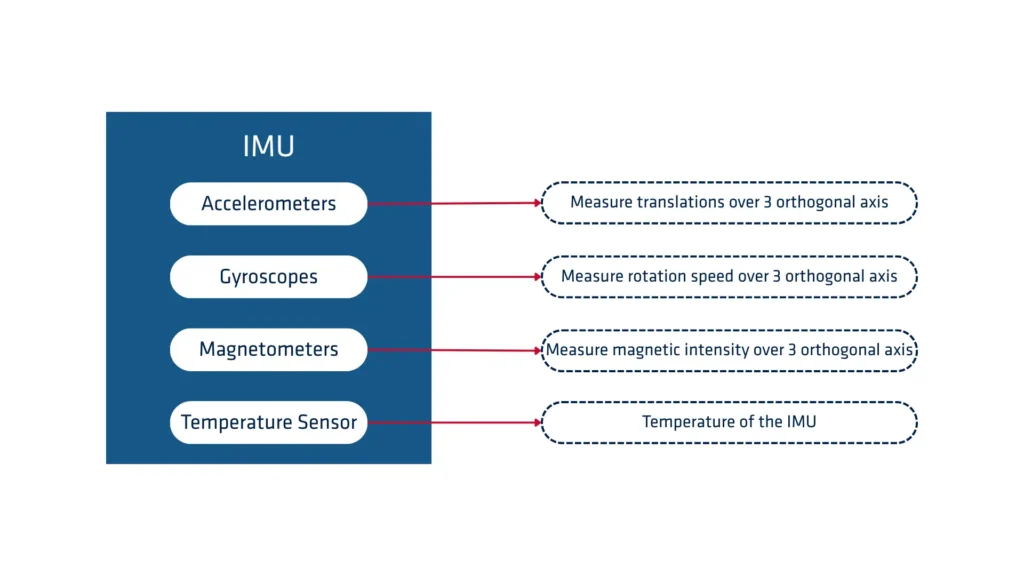
Eine Inertial Measurement Unit (IMU) ist ein elektronisches Gerät, das die spezifische Kraft, die Winkelgeschwindigkeit und manchmal das Magnetfeld, das den Körper umgibt, mithilfe einer Kombination aus Beschleunigungsmessern, gyroskopen und manchmal Magnetometern misst und meldet.
IMUs sind entscheidend für die Verfolgung und Steuerung der Position und Orientierung verschiedener Objekte, von Flugzeugen und Schiffen bis hin zu Smartphones und Gaming-Controllern.
Es gibt verschiedene Arten von IMU-Sensoren: solche, die auf FOG (Fiber Optic Gyroscope) basieren, die RLG-IMUs (Ring Laser Gyroscope) und schließlich IMUs, die auf MEMS-Technologie (Micro Electro-Mechanical Systems) basieren. Diese Technologie ermöglicht niedrigere Kosten und einen geringen Strombedarf bei gleichzeitiger Gewährleistung der Leistung. MEMS-basierte Systeme kombinieren daher hohe Leistung und extrem niedrigen Stromverbrauch in einer kleineren Einheit.
Das System gibt Rohdaten mit 1 kHz für anspruchsvolle Echtzeitanwendungen aus.
Wie wählt man die beste IMU aus?
Bei der Auswahl der besten IMU für Ihre Anforderungen müssen mehrere Faktoren berücksichtigt werden, um hohe Genauigkeit, Zuverlässigkeit und Leistung zu gewährleisten. Der erste Faktor ist die Sensorgenauigkeit, die sich direkt auf die Präzision der Messungen auswirkt.
Hochwertige IMUs weisen geringe Bias, Drift und Rauschen auf, wodurch sichergestellt wird, dass die von ihnen gelieferten Daten über die Zeit genau und stabil sind. Auch die Kalibrierung ist entscheidend, da gut kalibrierte Sensoren die Fehlerakkumulation minimieren, insbesondere in dynamischen Umgebungen.
Der Bereich und die Auflösung der IMU-Sensoren sind ebenfalls wichtig. Abhängig von Ihrer Anwendung benötigen Sie möglicherweise eine IMU mit einem großen Dynamikbereich, um extreme Bedingungen zu bewältigen, oder eine mit hoher Auflösung für präzise Messungen bei kleineren Bewegungen.
Der Stromverbrauch ist ein weiterer wichtiger Aspekt, insbesondere bei batteriebetriebenen Systemen wie Drohnen und autonomen Fahrzeugen. Eine Low-Power-IMU verlängert die Betriebszeit und reduziert die Energiekosten, wodurch sie für Langzeitmissionen effizienter wird.
Die Haltbarkeit ist von wesentlicher Bedeutung. IMUs, die für raue Umgebungen ausgelegt sind, wie sie beispielsweise in der Verteidigung oder Luft- und Raumfahrt verwendet werden, müssen robust genug sein, um Temperaturschwankungen, Vibrationen und Stößen standzuhalten. Berücksichtigen Sie zusätzlich den Formfaktor und die Integrationskompatibilität.
Kleinere, leichtere IMUs eignen sich am besten für tragbare Geräte oder unbemannte Systeme, während größere Systeme für robustere Anwendungen erforderlich sind.
Schließlich stellt die Wahl eines vertrauenswürdigen Herstellers mit nachweislicher Erfahrung in der Lieferung von Hochleistungs-IMUs sicher, dass Sie ein zuverlässiges Produkt erhalten, das Ihre Anforderungen an eine präzise und genaue Bewegungserfassung erfüllt.