后处理数据是指在勘测或任务结束后对记录的数据进行分析和修正。这种方法可提高精确度和可靠性。在导航和定位系统,特别是全球导航卫星系统中,后处理可去除噪音并对原始测量结果进行修正。工程师利用后处理纠正漂移、减少误差并完善定位结果。
后处理依赖于存储数据。这包括 GNSS 卫星信号、惯性测量和基站修正。工程师使用专用软件对数据进行离线处理。该软件应用数学模型来改进最终位置或轨迹。其结果是获得比实时数据更精确的路径或测量数据集。
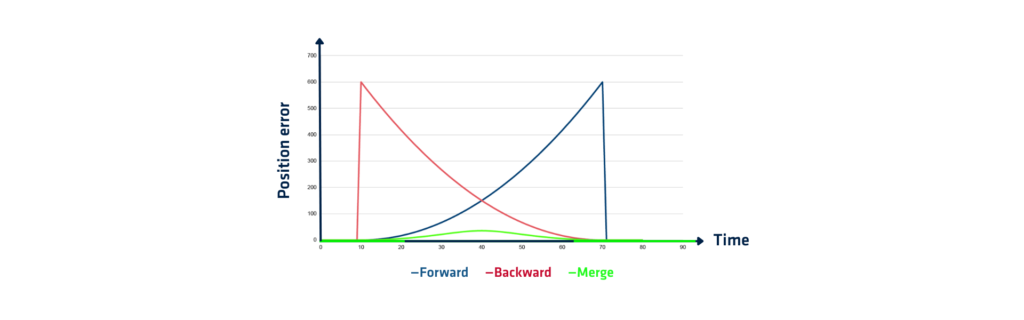
后向、前向和合并处理
后处理的一个主要方法是前向处理。这包括分析从任务开始到结束的数据。软件使用初始条件和测量值来估算时间序列上的位置。这种方法简单快捷。
后向处理是对从任务结束到开始的数据进行分析。这种方法利用最终条件来估计早期位置。它通常能在勘测开始时提供更准确的结果。它有助于纠正前向处理过程中出现的初始误差。当系统开始时没有良好的卫星覆盖时,后向处理尤其有用。
合并处理将前向和后向解决方案结合在一起。软件从两个方向处理数据。然后将两个轨迹合并为一个优化解决方案。这种处理方式能得到最可靠、最准确的结果。它能平衡初始条件和最终条件,最大限度地减少总误差。大多数高端后处理工具默认使用这种方法。
后处理还包括差分 GNSS 等技术。这种方法使用附近已知坐标基站的数据。系统将漫游车的数据与基站的数据进行比较。系统会进行修正,以减少与卫星相关的误差。另一种常见方法是紧密耦合的INS 后处理。它将卫星数据与惯性传感器数据相融合,以处理短时中断并提高位置稳定性。
勘测人员、工程师和研究人员依靠后处理来实现高精度。它对于测绘、水文地理、无人机飞行和科学研究至关重要。后处理工具需要仔细校准和正确的时间同步。数据质量在很大程度上取决于传感器的精度和任务期间正确的数据记录。