El Sistema de Referencia de Actitud y cabo (AHRS) es una tecnología crucial en la navegación aérea y marítima moderna. Proporciona información esencial sobre la orientación y el cabo de una aeronave o buque, garantizando una navegación segura y precisa.
También se conoce como Unidades de Referencia de Movimiento (MRU).
¿Qué es un sistema de referencia de actitud y cabo (AHRS)?
El Sistema de Referencia de Actitud y rumbo (AHRS) es un sistema integrado que proporciona datos de orientación tridimensionales, incluidos los ángulos de balanceo (roll), cabeceo (pitch) y guiñada (raw) , así como información sobre rumbo . Estos datos son vitales para que pilotos y navegantes mantengan el control y el conocimiento de la situación. El AHRS combina múltiples sensores para proporcionar información de orientación precisa y fiable.
Componentes del AHRS
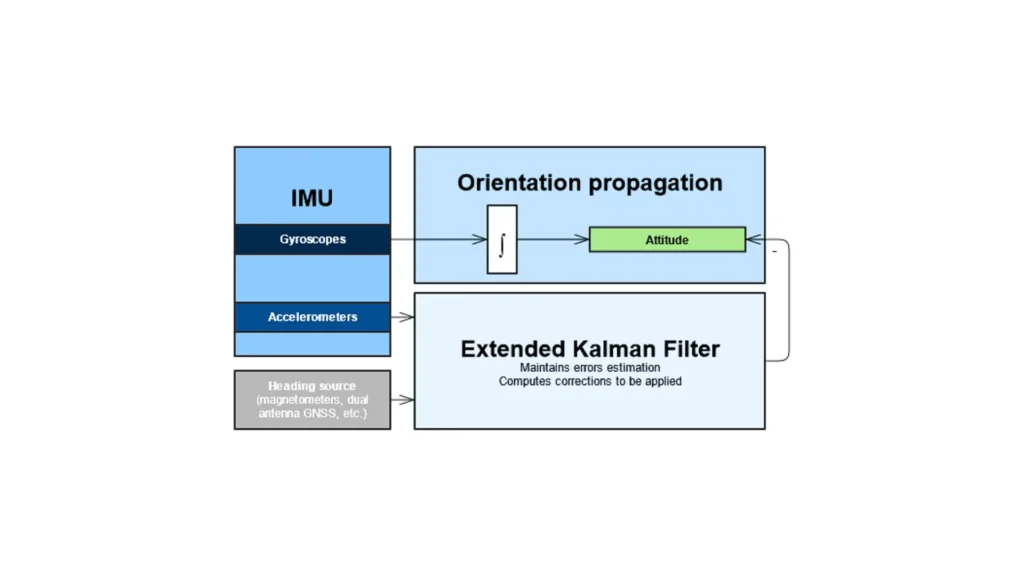
Los AHRS suelen constar de varios componentes clave:
- Giroscopios: Miden la velocidad angular alrededor de los tres ejes principalesbalanceo (roll), cabeceo (pitch) y guiñada (raw)).
- Acelerómetros: Miden la aceleración lineal, ayudando a determinar la orientación respecto a la gravedad terrestre.
- Magnetómetros: Miden el campo magnético terrestre para proporcionar información de rumbo .
- Microprocesadores: Procesan los datos de los sensores para calcular la orientación precisa y la información de rumbo .
Importancia del AHRS
El AHRS es esencial para:
1 - Estabilidad y control: Garantizar que la aeronave o embarcación mantiene la orientación y rumbo deseados.
2 - Navegación: Proporcionar datos exactos de orientación para una navegación precisa.
3 - Seguridad: Mejorar el conocimiento de la situación y reducir el riesgo de desorientación.
AHRS combina datos de giroscopios, acelerómetros y magnetómetros para proporcionar información completa sobre orientación y cabo. El sistema utiliza algoritmos avanzados para procesar los datos de los sensores y corregir errores y desviaciones.
Gama de aplicaciones
AHRS tiene una amplia gama de aplicaciones en la aviación, la navegación marítima y otros campos que requieren información precisa sobre la orientación y el cabo.
En la aviación, AHRS es un componente fundamental de los modernos sistemas de aviónica. Proporciona a los pilotos información en tiempo real sobre la orientación y el cabo de la aeronave, permitiendo una navegación segura y precisa. Los datos, que se muestran en la pantalla de vuelo principal (PFD), mejoran el conocimiento de la situación y reducen la carga de trabajo del piloto. Además, la integración de los sensores de movimiento con los sistemas de piloto automático permite automatizar el control del vuelo y mejorar la estabilidad.
Del mismo modo, en la navegación marítima, AHRS desempeña un papel crucial al proporcionar información sobre la orientación y el cabo a buques y embarcaciones. Es especialmente valioso en condiciones de mar gruesa, donde los datos precisos de orientación son esenciales para mantener la estabilidad y el control. En estas aplicaciones, AHRS AHRS ayuda a la navegación, el trazado del rumbo y los sistemas de dirección automática.
Además, AHRS se utiliza ampliamente en vehículos aéreos no tripulados(UAV) o drones. Proporciona los datos esenciales de orientación y cabo necesarios para un vuelo estable y unas maniobras precisas. Integrando el AHRS con sistemas de piloto automático, los UAV pueden alcanzar capacidades de vuelo autónomo, mejorando la fiabilidad y eficiencia de las operaciones de los drones.
En robótica, los sistemas AHRS son indispensables para proporcionar información de orientación y cabo a robots móviles y brazos robóticos. La precisión de los datos de orientación es esencial para tareas que requieren movimientos y posicionamiento precisos. Esta capacidad mejora significativamente la habilidad de los robots para navegar y realizar tareas complejas en entornos dinámicos.
Utilización de sensores de movimiento en sus proyectos
Un AHRS es una tecnología vital que proporciona información precisa y fiable sobre orientación y rumbo para diversas aplicaciones, como la aviación, la navegación marítima, los vehículos aéreos no tripulados y la robótica.
Al combinar datos de giroscopios, acelerómetros y magnetómetros, proporciona datos de orientación completos y precisos.
Además, los algoritmos avanzados para la fusión de sensores y la corrección de errores garantizan la precisión y fiabilidad del sistema. A medida que avance la tecnología, estos sistemas seguirán desempeñando un papel crucial en la mejora de la navegación y el control en múltiples ámbitos.