lage & richtung Reference System (AHRS) ist eine entscheidende Technologie in der modernen Luft- und Seeschifffahrt. Es liefert wichtige Informationen über die Orientierung und richtung eines Flugzeugs oder Schiffs und gewährleistet so eine sichere und genaue Navigation.
Es wird auch als Motion Reference Units (MRU)) bezeichnet.
Was ist ein lage & richtung Referenzsystem (AHRS))?
Das lage und richtung (AHRS) ) ist ein integriertes System, das dreidimensionale Orientierungsdaten, einschließlich rollen, nicken und Gierwinkel, sowie richtung liefert. Diese Daten sind für Piloten und Navigatoren unerlässlich, um die Kontrolle und das Situationsbewusstsein aufrechtzuerhalten. AHRS kombiniert mehrere Sensoren, um genaue und zuverlässige Orientierungsdaten zu liefern.
Bestandteile des AHRS
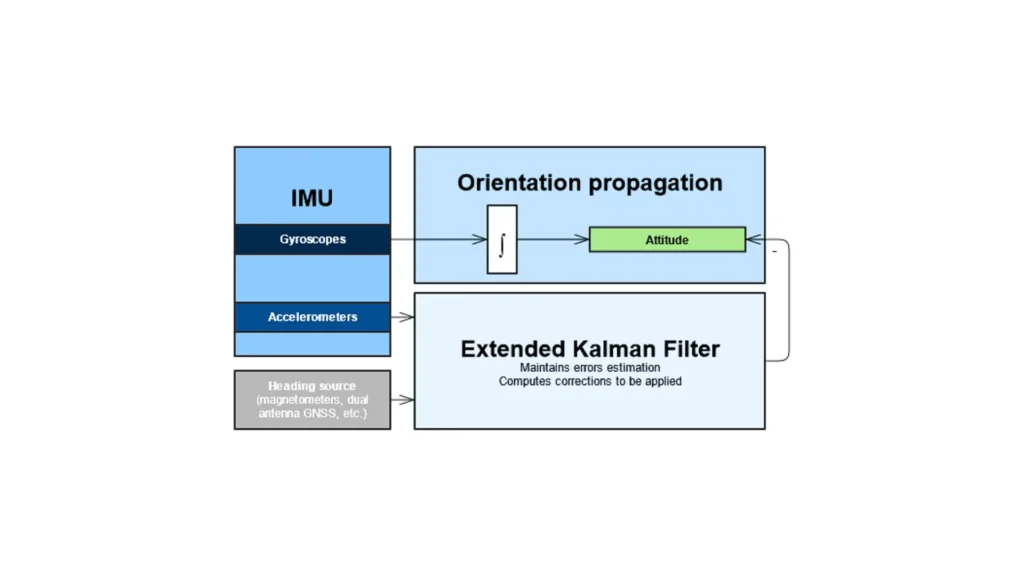
AHRS besteht in der Regel aus mehreren Schlüsselkomponenten:
- Gyroskope: Messen die Winkelgeschwindigkeit um die drei Hauptachsenrollen, nicken und gieren).
- Beschleunigungsmesser: Sie messen die lineare Beschleunigung und helfen bei der Bestimmung der Ausrichtung im Verhältnis zur Erdanziehung.
- Magnetometer: Sie messen das Magnetfeld der Erde und liefern Informationen über richtung .
- Mikroprozessoren: Verarbeiten Sensordaten, um präzise Orientierungs- und richtung zu berechnen.
Die Bedeutung eines AHRS
AHRS ist unerlässlich für:
1 - Stabilität und Kontrolle: Sicherstellen, dass das Flugzeug oder Schiff die gewünschte Orientierung und richtung beibehält.
2 - Navigation: Bereitstellung genauer Orientierungsdaten für eine präzise Navigation.
3 - Sicherheit: Verbesserung des Situationsbewusstseins und Verringerung des Risikos der Desorientierung.
AHRS kombiniert Daten von Gyroskopen, Beschleunigungs- und Magnetometern, um umfassende Orientierungs- und richtung zu liefern. Das System verwendet fortschrittliche Algorithmen zur Verarbeitung von Sensordaten und zur Korrektur von Fehlern und Drift.
Anwendungsbereich
AHRS hat eine breite Palette von Anwendungen in der Luftfahrt, der Seeschifffahrt und anderen Bereichen, in denen präzise Orientierungs- und richtung benötigt werden.
In der Luftfahrt ist AHRS eine entscheidende Komponente moderner Avioniksysteme. Es versorgt die Piloten mit Echtzeit-Informationen über die Orientierung und richtung des Flugzeugs und ermöglicht so eine sichere und genaue Navigation. Die Daten, die auf dem Primary Flight Display (PFD) angezeigt werden, verbessern das Situationsbewusstsein und verringern die Arbeitsbelastung des Piloten. Darüber hinaus ermöglicht die Integration von Bewegungssensoren in Autopilotsysteme eine automatische Flugsteuerung und Stabilitätsverbesserung.
Auch in der maritimen Navigation spielt das AHRS eine entscheidende Rolle bei der Bereitstellung von Orientierungs- und richtung für Schiffe und Boote. Besonders wertvoll ist es bei rauer See, wo genaue Orientierungsdaten für die Aufrechterhaltung von Stabilität und Kontrolle unerlässlich sind. Bei diesen Anwendungen hilft AHRS bei der Navigation, der Kursbestimmung und bei automatischen Lenksystemen.
Darüber hinaus wird AHRS häufig in unbemannten Luftfahrzeugen(UAVs) oder Drohnen eingesetzt. Es liefert die wesentlichen Orientierungs- und richtung , die für einen stabilen Flug und ein präzises Manövrieren benötigt werden. Durch die Integration von AHRS in Autopilotsysteme können UAVs autonom fliegen, was die Zuverlässigkeit und Effizienz des Drohnenbetriebs erhöht.
In der Robotik sind AHRS-Systeme unverzichtbar für die Bereitstellung von Orientierungs- und richtung für mobile Roboter und Roboterarme. Genaue Orientierungsdaten sind für Aufgaben, die präzise Bewegungen und Positionierungen erfordern, unerlässlich. Diese Fähigkeit verbessert die Fähigkeit von Robotern, in dynamischen Umgebungen zu navigieren und komplexe Aufgaben auszuführen, erheblich.
Verwendung von Bewegungssensoren in Ihren Projekten
Ein AHRS ist eine unverzichtbare Technologie, die genaue und zuverlässige Orientierungs- und richtung für verschiedene Anwendungen liefert, z. B. in der Luftfahrt, der maritimen Navigation, bei UAVs und in der Robotik.
Durch die Kombination von Daten aus Gyroskopen, Beschleunigungs- und Magnetometern liefert es umfassende und präzise Orientierungsdaten.
Darüber hinaus gewährleisten fortschrittliche Algorithmen zur Sensorfusion und Fehlerkorrektur die Genauigkeit und Zuverlässigkeit des Systems. Im Zuge des technologischen Fortschritts werden diese Systeme weiterhin eine entscheidende Rolle bei der Verbesserung der Navigation und Steuerung in verschiedenen Bereichen spielen.