Autonomous vehicle engineering: Zurich UAS Racing’s navigation with Ellipse-D
Zurich UAS Racing has solved critical position drift challenges that previously made driverless operation impossible for them. This breakthrough in autonomous vehicle engineering now allows the team to begin their journey toward the autocross discipline in the famous Formula Student competition.
Ellipse-D allows us to get an absolute position of our car on the track. An accurate position is essential for the operation of our driverless system. One of our biggest problems has been position drift over time. With the Ellipse-D, we will be able to tackle the autocross discipline, which was previously impossible for us. | Finn Scheller, C-Leader of Zurich UAS Racing Team.

The team background in autonomous vehicle engineering
Zurich UAS Racing (ZUR) is a passionate Formula Student team from the Zurich University of Applied Sciences in Winterthur, Switzerland. Founded in 2019, this ambitious student association competes in the world’s largest engineering competition, Formula Student, building electric and autonomous cars to race against universities from around the globe.

The team has grown to over 70 motivated students from various degree programs, all united by their goal of optimizing racing performance and advancing autonomous vehicle engineering.
Formula Student
The internationally highly regarded Formula Student competition challenges student teams to design and build formula racing cars, competing in various disciplines including engineering design, cost analysis, and dynamic track events.

The car: ZUR04
ZUR’s journey began with their first functional car in 2021, successfully participating in electric vehicles (EV) events since 2022. Their driverless racing car, ZUR04, represents the cutting edge of student autonomous vehicle engineering with four electric wheel hub motors producing 140 kW total power, enabling acceleration from 0 to 100 km/h in just 2.5 seconds.
The vehicle is designed for both human-driven and autonomous racing, with performance comparable to professional racing cars. Its driverless system is currently in the testing phase.
Zurich UAS Racing’s technical requirements
ZUR needed an advanced Inertial Navigation System (INS) that could seamlessly integrate with their autonomous racing system while meeting the demanding requirements of high-speed competition.
Their main challenge was achieving reliable positioning in the dynamic environment of racing, where traditional localization systems often fail due to position drift over time.
The system had to provide absolute position accuracy essential for their driverless system operation, particularly for the challenging autocross discipline that requires precise navigation through complex cone arrangements.
So, in a nutshell, these were the critical issues:
- Position drift: significant drift over time preventing accurate localization.
- Autocross limitation: unable to compete in autocross discipline due to positioning issues.
- Limited data insights: insufficient vehicle dynamics data for software optimization.

And these were the core requirements:
- Precise localization: Need for absolute position on track.
- ROS Integration: Seamless integration with existing ROS-based autonomous system.
- Compact solution: Lightweight unit with good power-to-weight ratio.
- Open documentation: Easily accessible technical resources.
- High dynamics: Capability to handle extreme racing conditions.
After evaluating ZUR’s scenario, we recommended our Ellipse-D, an inertial navigation system (INS) specifically designed for demanding applications where precision and reliability are paramount.
Our solution for autonomous racing: Ellipse-D
Ellipse-D is the smallest dual-antenna RTK GNSS/INS system, providing centimeter-level positioning and precise heading for dynamic racing applications.
This technology represents significant advancement in autonomous vehicle engineering solutions, offering to team:
- High precision: Centimeter-level positioning accuracy essential for precise track navigation and obstacle avoidance in autonomous racing.
- Dual-antenna heading: Superior performance in challenging environments where magnetic interference from electric motors and electronic systems would compromise traditional compass-based systems.
- Racing compliance: Compact design and rugged construction ideal for high-dynamic racing applications, with exceptional vibration handling and temperature resistance.

Finally, the fourth point essential for ZUR’s aspiration was the ROS integration which, in their own words, combined with the other features made the whole package the most cost-effective solution available in the market:
“The main selling point for us was the open-source documentation and interface library. The full support through ROS is also a big advantage for us as our car already runs ROS. So the integration was easy. We also appreciated SBG System’s support of our team to improve our performance thanks to their products. Compared to other suppliers of such products, SBG Systems offered us the best value for money,” emphasizes Scheller.
Advanced integration and performance
The integration process demonstrated the Ellipse-D’s versatility and the effectiveness of SBG Systems’ support approach. Connected to both a RaspberryPi and NVIDIA Jetson computing platform, the system utilizes both the sbgECom library and ROS2 package for comprehensive data access and processing.
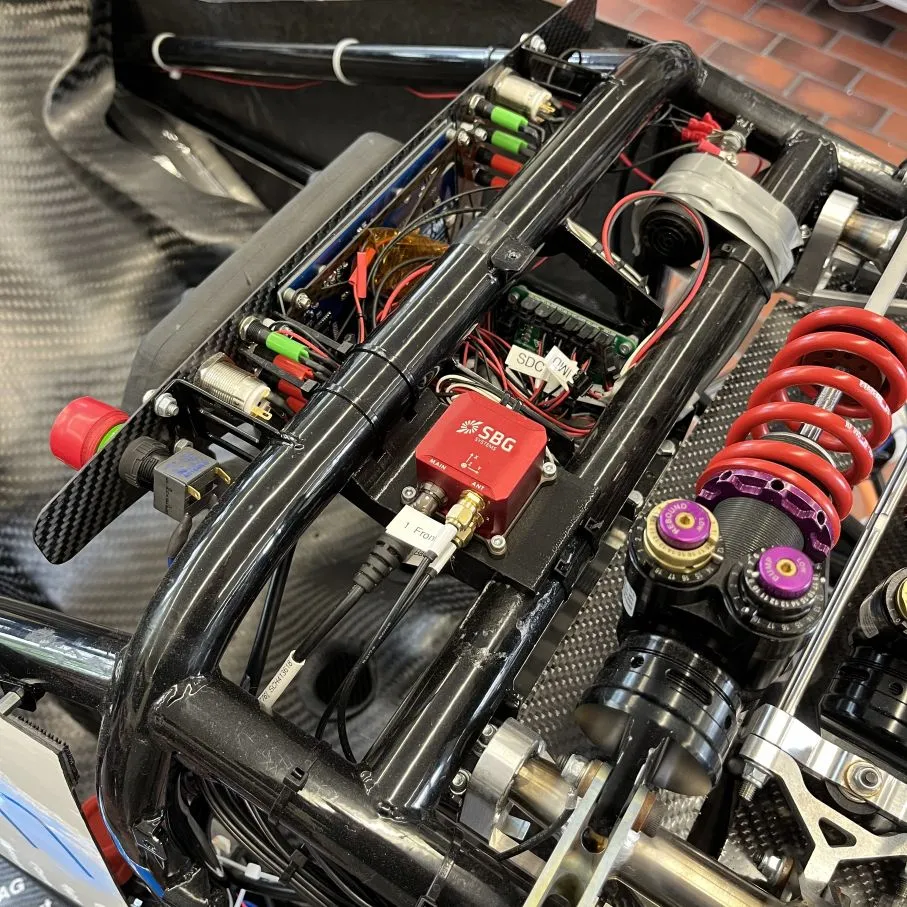
This architecture enables real-time navigation data distribution throughout the autonomous system while maintaining the flexibility needed for custom algorithm development.
The team is also leveraging the Ellipse-D’s capabilities to develop advanced torque vectoring algorithms that utilize the INS data. They have also built a GNSS RTK-based rover and base station to provide precise track ground truth.
In addition to integrating the INS into their driverless car ZUR04, with track tests scheduled for this summer, the team has incorporated the INS into their newly built race car, ZUR05. The Ellipse-D will also be a key component in next season’s driverless vehicle, the ZUR06.
Zurich UAS Racing’s top three picks
ZUR emphasized three standout aspects they love about working with SBG Systems.
- Open-source: First, they appreciated the open-source approach that aligns with their educational mission and development methodology. The transparent documentation and interface libraries enable students to understand and modify the system according to their specific needs, providing invaluable learning opportunities in autonomous vehicle engineering.
- Excellent documentation: The team valued the comprehensive and openly available product documentation that streamlined their integration process. Unlike many commercial systems that provide limited technical details, SBG Systems’ approach enabled rapid understanding and implementation.
- Good communication: Finally, they highlighted the outstanding communication and support, noting that they always felt heard and received answers to all their questions. This responsive support proved crucial for a student team working within tight competition deadlines.
Conclusion
The implementation addressed ZUR’s most critical challenge: position drift that had previously prevented them from competing in the autocross discipline. With the Ellipse-D’s centimeter-level accuracy and dual-antenna heading determination, the team can now start trial runs with the goal of competing driverless in the next season (Summer 2026) with their next generation race car.

This collaboration exemplifies the power of industry-education partnerships in advancing autonomous vehicles technology.
“Ellipse is the perfect entry point into INS systems. In the future, we plan to use more powerful systems in conjunction with our newly developed Ethernet-based vehicle system,” concludes Scheller.
Our commitment to support student teams like ZUR demonstrates how providing access to professional-grade navigation technology enables the next generation of engineers to push the boundaries of what’s possible in autonomous racing.
Ellipse-D
Ellipse-D is a compact, high-performance GNSS-aided inertial navigation system that provides reliable orientation, position, and heave measurements.
It combines an IMU with a dual band GNSS receiver and uses sensor fusion algorithms to deliver accurate positioning in challenging environments.
It offers dual-antenna capability for precise heading in static conditions.

Ask a quotation for Ellipse-D
Do you have questions?
Welcome to our FAQ section! Here, you’ll find answers to the most common questions about the applications we showcase. If you don’t find what you’re looking for, feel free to contact us directly!
How self-driving cars work?
Self-driving cars are vehicles equipped with sophisticated systems that enable them to navigate and control themselves without human intervention. These vehicles use a combination of autonomous driving sensors and algorithms to perceive their environment, make decisions, and perform self driving tasks. The goal is to achieve full autonomy, where the vehicle can handle all aspects of driving safely and efficiently.
Self-driving cars rely on an array of key technologies to perceive their surroundings. These include:
- GNSS (Global Navigation Satellite System): to get the real-time updates on the self-driving car position, speed, and direction.
- INS (Inertial Navigation Systems): to maintain accuracy in case of GNSS signal outages. It provides real-time updates on the self driving car position, speed, and direction.
- LiDAR (Light Detection and Ranging): use of laser beams to create a detailed 3D map of the vehicle’s environment. This technology helps the car detect and measure objects around it, including other vehicles, pedestrians, and road signs.
- Radar (Radio Detection and Ranging): use of radio waves to detect the speed, distance, and direction of objects. Radar is particularly useful in adverse weather conditions and for detecting objects at longer ranges.
- Cameras: to capture visual information about the vehicle’s environment, including lane markings, traffic signals, and road signs. They are essential for interpreting complex visual cues and making decisions based on visual data.
What are the 6 degrees of automation in vehicles?
The 6 levels of self-driving cars, defined by the Society of Automotive Engineers (SAE) in their J3016 standard, describe the degrees of automation in vehicles. Here’s a breakdown:
- Level 0: no automation. Warnings or momentary assistance, like automatic emergency braking or blind-spot warnings, but no sustained automation.
- Level 1: driver assistance. Single automated system for support, such as adaptive cruise control (maintaining speed and distance) or lane-keeping assistance.
- Level 2: partial automation. Combination of systems, such as steering and acceleration/deceleration, but no decision-making.
- Level 3: conditional automation. Car handles most driving tasks in specific conditions (e.g., highway driving). The system can monitor the environment.
- Level 4: high automation. The car operates independently in predefined scenarios. No driver attention required in these areas.
- Level 5: full automation. The vehicle can perform all tasks in every environment a human driver could handle. No steering wheel or pedals may be present.
These levels illustrate the progression from human-controlled vehicles to fully autonomous systems capable of handling all driving tasks.
Does INS accept inputs from external aiding sensors?
Inertial Navigation Systems from our company accept inputs from external aiding sensors, such as air data sensors, magnetometers, Odometers, DVL and other.
This integration makes the INS highly versatile and reliable, especially in GNSS-denied environments.
These external sensors enhance the overall performance and accuracy of the INS by providing complementary data.
What is the difference between IMU and INS?
The difference between an Inertial Measurement Unit (IMU) and an Inertial Navigation System (INS) lies in their functionality and complexity.
An IMU (inertial measuring unit) provides raw data on the vehicle’s linear acceleration and angular velocity, measured by accelerometers and gyroscopes. It supplies information on roll, pitch, yaw, and motion, but does not compute position or navigation data. The IMU is specifically designed to relay essential data about movement and orientation for external processing to determine position or velocity.
On the other hand, an INS (inertial navigation system) combines IMU data with advanced algorithms to calculate a vehicle’s position, velocity, and orientation over time. It incorporates navigation algorithms like Kalman filtering for sensor fusion and integration. An INS supplies real-time navigation data, including position, velocity, and orientation, without relying on external positioning systems like GNSS.
This navigation system is typically utilized in applications that require comprehensive navigation solutions, particularly in GNSS-denied environments, such as military UAVs, ships, and submarines.
What is the difference between AHRS and INS?
The main difference between an Attitude and Heading Reference System (AHRS) and an Inertial Navigation System (INS) lies in their functionality and the scope of the data they provide.
AHRS provides orientation information—specifically, the attitude (pitch, roll) and heading (yaw) of a vehicle or device. It typically uses a combination of sensors, including gyroscopes, accelerometers, and magnetometers, to calculate and stabilize the orientation. The AHRS outputs the angular position in three axes (pitch, roll, and yaw), allowing a system to understand its orientation in space. It is often used in aviation, UAVs, robotics, and marine systems to provide accurate attitude and heading data, which is critical for vehicle control and stabilization.
A INS not only provides orientation data (like an AHRS) but also tracks a vehicle’s position, velocity, and acceleration over time. It uses inertial sensors to estimate movement in 3D space without relying on external references like GNSS. It combines the sensors found in AHRS (gyroscopes, accelerometers) but may also include more advanced algorithms for position and velocity tracking, often integrating with external data like GNSS for enhanced accuracy.
In summary, AHRS focuses on orientation (attitude and heading), while INS provides a full suite of navigational data, including position, velocity, and orientation.