Ekinox Micro and Quanta Micro are at the forefront of urban navigation, and we’ve subjected them to automotive tests.
They are two Inertial Navigation Systems, combining tactical MEMS-based IMU and full-featured RTK GNSS receivers to deliver unparalleled performance within an astonishingly compact form.
Specially tailored for applications with strict SWaP constraints like unmanned ground/air/sea vehicles, indoor mapping and even UAV surveying.
This comprehensive performance assessment article is based on an exhaustive test executed in July 2022 to validate the Quanta Micro’s capabilities in anticipation of its commercial introduction. Through this report, the systems’ dynamic performance is demonstrated.
The sensors were tested extensively in various GNSS environments including open skies, medium urban areas, and urban canyons. The results consistently showed exceptional data quality. Both Quanta Micro and Ekinox Micro exceeded their specified performance, even in challenging scenarios.
While the specifications are usually based on the industry standard scenario like regular land conditions after a warm-up phase, the test included difficult urban conditions without a warm-up phase.
Remarkably, Ekinox Micro and Quanta Micro have excelled in this test, demonstrating outstanding performance across all conditions.
Prerequisite
Reading this test reports requires some level of knowledge of the inertial navigation and post-processing concepts. Our knowledge base will help you start your journey into the wonderful world of inertial navigation.
Acronyms
- CORS: Continuously Operating Reference Stations
- DUT: Device under test
- EUT: Equipment under test
- FOG: Fiber Optic Gyroscope
- GNSS: Global Navigation Satellite Systems (GPS + GLONASS + BEIDOU + GALLILEO)
- IGN: Institut Géographique National (official French geographic agency)
- IMU: Inertial Measurement Unit
- INS: Inertial Navigation System
- LiDAR: Light Detection And Ranging
- MEMS: Micro Electro-Mechanical System
- Merged: Forward + Backward post-processing using Qinertia
- PPK: Post-processed Kinematic
- RGP: Réseau GNSS Permanent (French national CORS network)
- RMS: Root Mean Square
- RTK: Real-Time Kinematic
- Std: Standard deviation
- SWaP-C: Size Weight and Power – Cost
- TC: Tight Coupling
- UAV: Unmanned Aerial Vehicle
Test mission objectives and specifications
Mission planning and execution
The test has been conducted onboard SBG Systems test vehicle on July 7th, 2022. It was a 115-minute-long drive, under clear weather conditions, in the neighborhood of SBG System facilities including:
- 45 minutes of contiguous operations under open sky conditions.
- 35 minutes of contiguous operations under semi-dense urban environment.
- 35 minutes of contiguous operations under harsh urban environment, including tunnels.

Considering the complexity of the environment, no particular care has been given to mission planning to select a favorable time of day with respect to satellites visibility.
Mission goals
This mission was specifically designed to demonstrate how the Quanta Micro and Ekinox Micro INS behave in a real-world scenario. This allowed us to validate that the INS meet (and exceeds) their specifications, but also to demonstrate their outstanding performance even under the most difficult GNSS conditions.
During the mission we collected data measuring real-time performance of the Quanta Micro; we then performed post-processing of the same datasets (PPK).
This allows us to provide a full view of the performance of the Quanta Micro INS in an automotive environment; and to a lesser extent other applications (which are the subject of specific test reports).
The advantage of using optimized motion profiles is demonstrated by comparing processing in automotive and airplane motion profiles.
Automotive tests setup
Equipment Under Test
| Name | Description | HW revision | Serial Number | Firmware version |
|---|---|---|---|---|
| EUT #1 | Quanta Micro | 1.1 | 000041817 | 4.1.5929-Dev |
| EUT #2 | Quanta Micro | 1.1 | 000041818 | 4.1.5929-Dev |
| Assessed by proxy | Ekinox Micro | 0.1 | 000046860 | 5.0.1945-beta |
For all tests installation parameters (misalignments, lever arm, etc.) were known a priori either from CAD drawings or from previous calibrations.
Keep in mind that although both EUT are the Quanta Micro, the content of this test report is fully applicable to the Ekinox Micro: it is a rugged version of Quanta Micro and behaves exactly in the same manor. A series of meticulous internal comparisons have confirmed this assertion.
Reference trajectory
The reference source used to assess the performance errors is a Qinertia processed tightly coupled trajectory with data coming from the SBG Systems Horizon IMU (FOG based ultimate performance), Navsight-S and Pegasem odometer installed onboard the vehicle along with the EUT. Qinertia version used for post-processing was 3.2.881-stable.
| Name | Description | Position accuracy | Attitude accuracy | Heading accuracy |
|---|---|---|---|---|
| Navsight Horizon | FOG based INS | 0.01m (0.01m @ 10s) (0.05m @ 60s) | 0.004° (0.004° @ 10s) (0.005° @ 60s) | 0.008° (0.008° @ 10s) (0.010° @ 60s) |
The two VSP6037L GNSS antennas feeding the Navsight-S are shared with the EUT (see test setup diagram).
From the posteriori data analysis, the quality indicators (position and attitude standard deviation estimators) of the post-processed Horizon trajectory fully allow the latter to be used as a reference with respect to the EUT.
Each of the three INS positions installed onboard has been transferred to a common point to allow for direct comparisons.
Base station
All PPK and RTK operations were performed using a single base, the SBG’S station which is installed on the roof of SBG Systems facilities and included into the IGN RGP, the French CORS network.
SBGS provides full GNSS constellations tracking (GPS + GLONASS + GALILEO + BEIDOU). All four constellations were used for real-time RTK operations.
Test vehicle
The test vehicle was an SBG Systems dedicated van, fitted with our standard equipment as presented in the following setup diagram.

The baseline between both GNSS antennas is about 2 m and most installation parameters are known with particularly good precision.
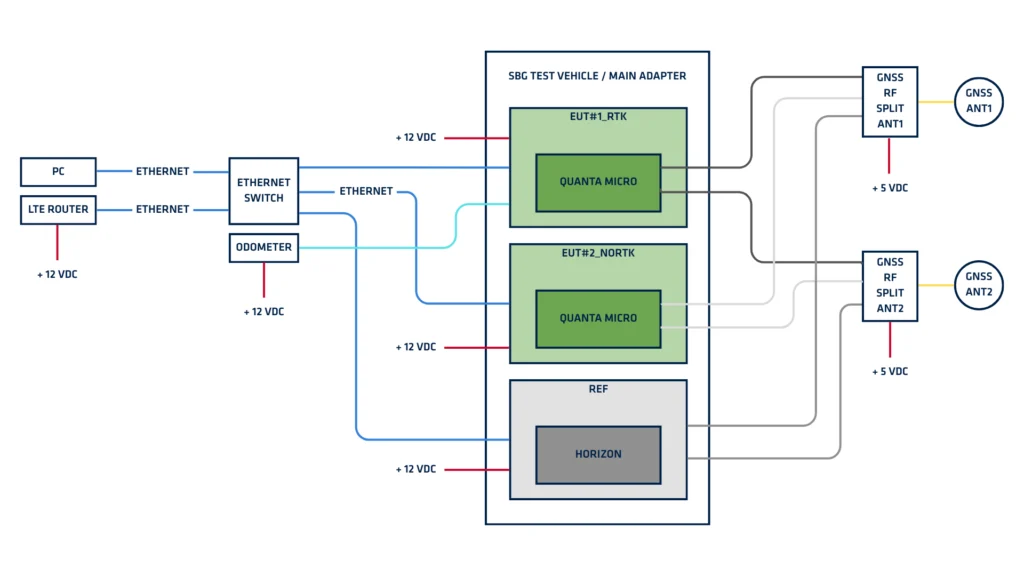
EUT configuration
The Equipment under test (EUT) were configured as follows for real-time measurements:
- EUT1: GNSS with all 4 constellations, RTK and odometer aiding.
- EUT2: GNSS with all 4 constellations, no RTK, no odometer aiding.
Results of automotive tests
Automotive tests include a warm-up phase, and all statistics have been computed with its purposeful inclusion.
This choice has in most cases a negative impact on most figures, especially for the heading errors which decrease very fast in the first 5-10 minutes of the mission and where high values have a significant impact on std and RMS.
In addition, we computed the no RTK, RTK, and PPK dual antenna statistics, which best represent automotive profiles, by intentionally including all three mission parts: open-sky, medium, and harsh GNSS environments. This choice also has a negative impact on most figures.
These two choices make the values appear pessimistic. However, they demonstrate that Quanta Micro is still usable with particularly good performance straight out of the alignment phase (even if no warm-up is possible) and prove the robustness of the Quanta Micro algorithms which are able to almost meet the product performance specifications even in a test environment much harder than specified.
Real-time scenarios
These INS are able to function in real time, providing a high frequency low latency navigation solution with or without RTK corrections. The tables and figures below provide detailed real-time results for both EUT under the following conditions.
- automotive motion profile
- odometer aiding for EUT #1 (RTK), no odometer aiding for EUT #2 (No RTK)
- with dual antenna GNSS heading input
| EUT#1 (RTK + odo) | EUT#2 (no RTK, no odo) | |||
|---|---|---|---|---|
| Error | 68% | 95% | 68% | 95% |
| 2D position | 0.021m | 0.246m | 1.155m | 2.734m |
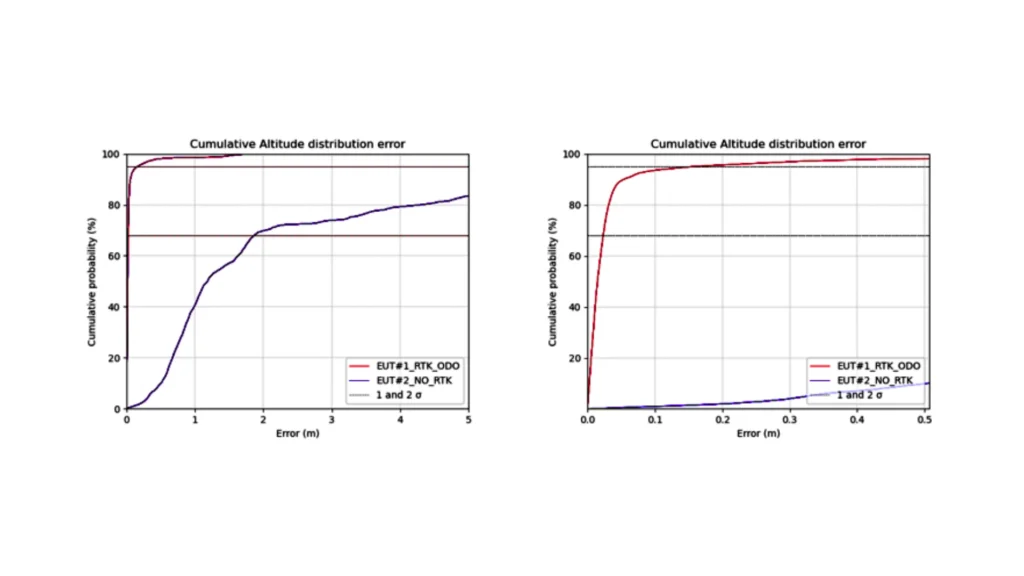
| Vertical position | 0.023m | 0.157m | 1.865m | 7.329m |
| Roll / Pitch | 0.011° | 0.026° | 0.015° | 0.035° |
| Yaw | 0.060° | 0.140° | 0.078° | 0.190° |
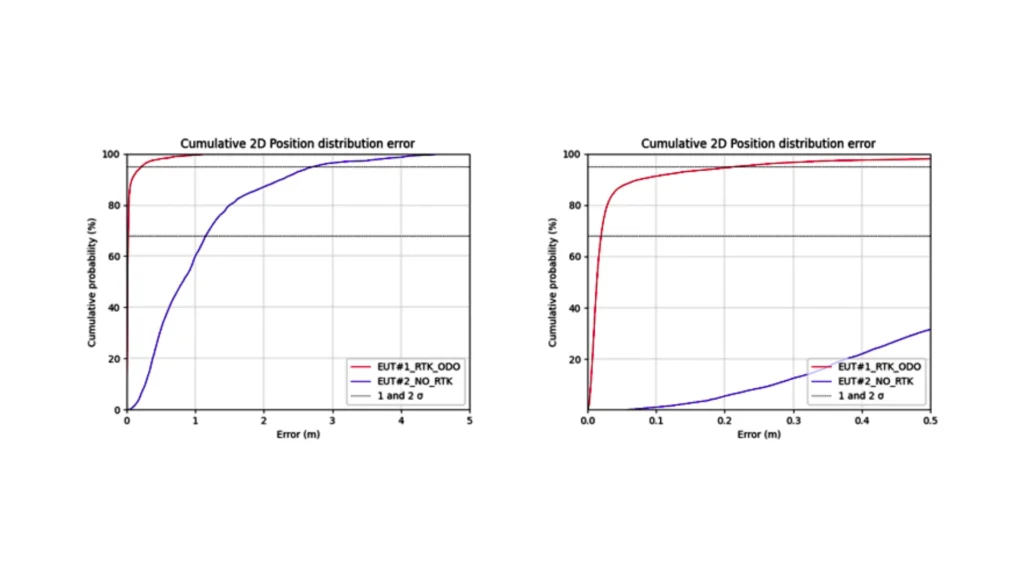
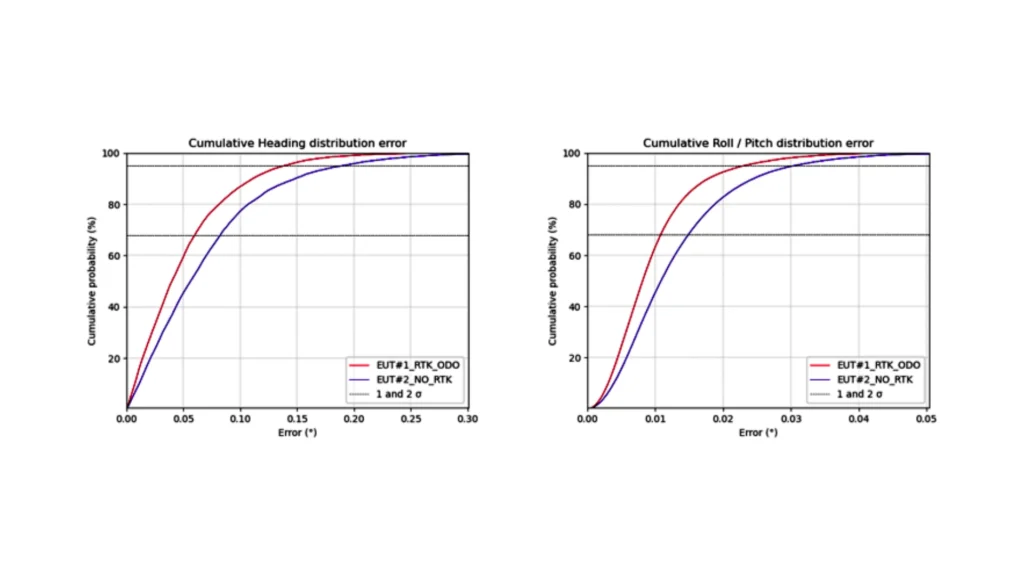
Despite the challenging conditions, the real time attitude and heading performance enables precise navigation, with better than 0.08° heading accuracy without RTK and better than 0.06° with RTK. Roll and pitch angles are also highly accurate (< 0.015° with or without RTK).
On the position side, the INS is able to cope with short GNSS outages, impacting very positively the 68th and 95th percentiles, compared to traditional GNSS technology.
The typical position performance specification cannot be met in such challenging environments. However, when analyzing open-sky and mid-urban GNSS environments, the system easily meets these specifications.
Post-processed scenarios
These scenarios assess the product’s ultimate performance achievable with Qinertia post-processing software in TC merged (forward + backward) computation mode and compare the influence of the motion profile. The results, displayed for a single EUT (EUT #2), were nearly identical for both units.
| TC Automotive profile (dual antenna + odo) | TC Airplane profile (single antenna | |||
|---|---|---|---|---|
| Error | 68% | 95% | 68% | 95% |
| 2D position | 0.014m | 0.093m | 0.014m | 0.100m |
| Vertical position | 0.008m | 0.032m | 0.008m | 0.034m |
| Roll / Pitch | 0.011° | 0.032° | 0.011° | 0.032° |
| Yaw | 0.051° | 0.211° | 0.041° | 0.208° |
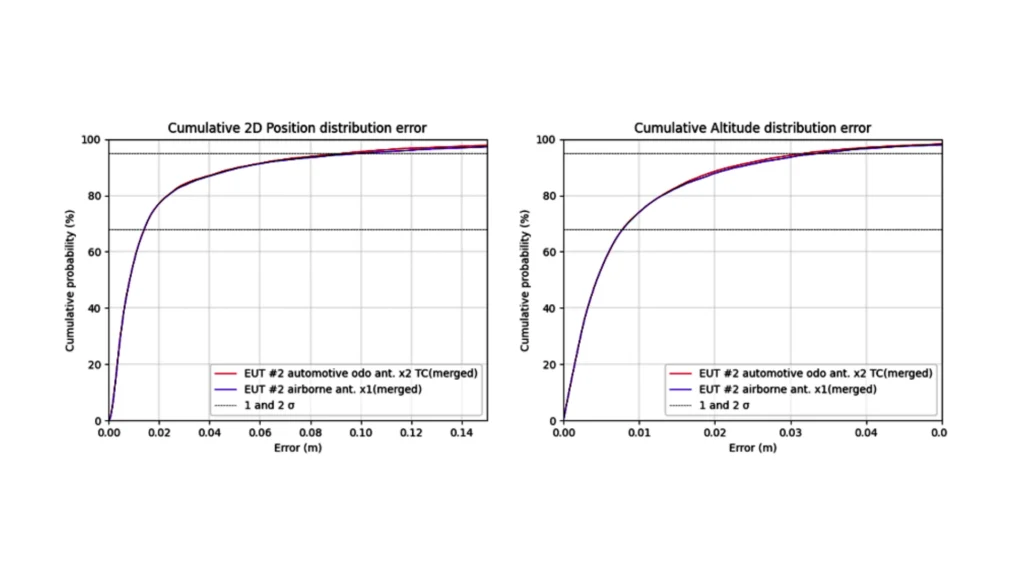
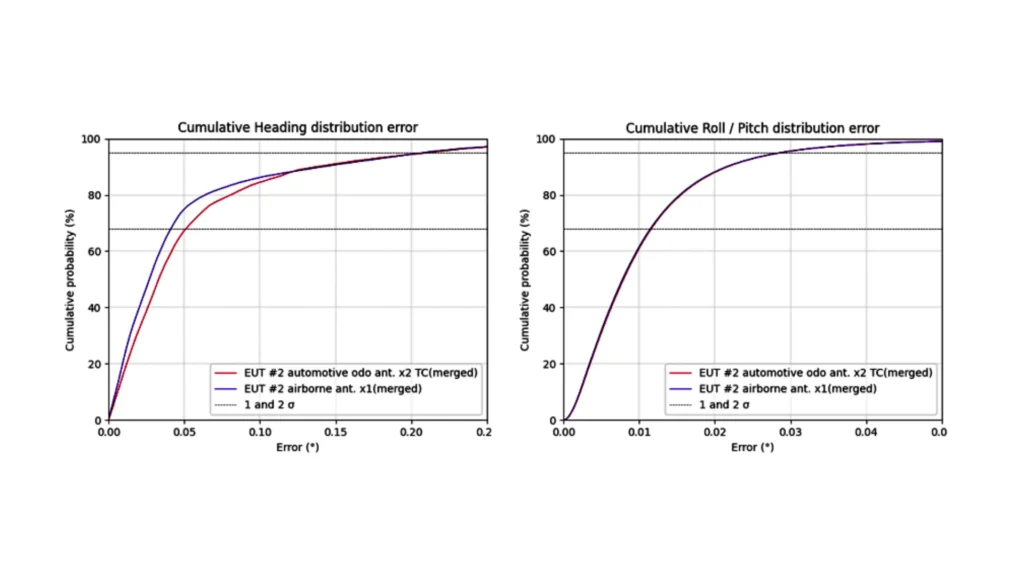
The previous table and plots show that the motion profile has a marginal influence on post-processing performance.
Even though the GNSS environment was very difficult, the product behaves very well and produces very accurate results. As for real time, restricting the mission to open sky and medium urban environment leads to results better than product specifications.
Conclusion
The test and subsequent data analysis of Ekinox Micro and Quanta Micro highlight their strong capabilities, reliability, and accuracy. These systems perform exceptionally well in both single and dual antenna modes (RTK GNSS receivers), even in challenging environments.
Ekinox Micro and Quanta Micro are excellent choices for real-time applications that require steady and accurate positioning and attitude determination. They work effectively even in demanding urban environments, showcasing their robustness.
Additionally, in scenarios where real-time performance is not crucial (such as LiDAR surveying and photogrammetry), SBG Systems’ Qinertia software offers exceptional post-processing, elevating performance to centimeter-level accuracy even in challenging GNSS environments. This makes the combination of the INS and Qinertia the perfect choice for direct georeferencing and SLAM techniques.
This study conclusively validates that Quanta Micro and Ekinox Micro are suitable across various applications, including those with strict size, weight, and performance considerations.
- Quanta Micro, designed as an OEM solution, seamlessly integrates into UAV surveying and volumetric navigation applications.
- With its user-friendly design and ruggedness (qualified under MIL-STD-461 and MIL-STD-1275), Ekinox Micro suits light survey applications, but is at its best in navigation applications where robustness is key.
For surveying tasks that demand more flexible SWaP-C parameters and higher precision across a broad spectrum of conditions, SBG Systems offers Quanta Plus, Quanta Extra, Ekinox, Apogee, and Navsight products. These alternatives, also fully compatible with Qinertia’s post-processing capabilities, provide heightened performance levels and serve as excellent options for applications that require utmost performance.
Download the PDF report