
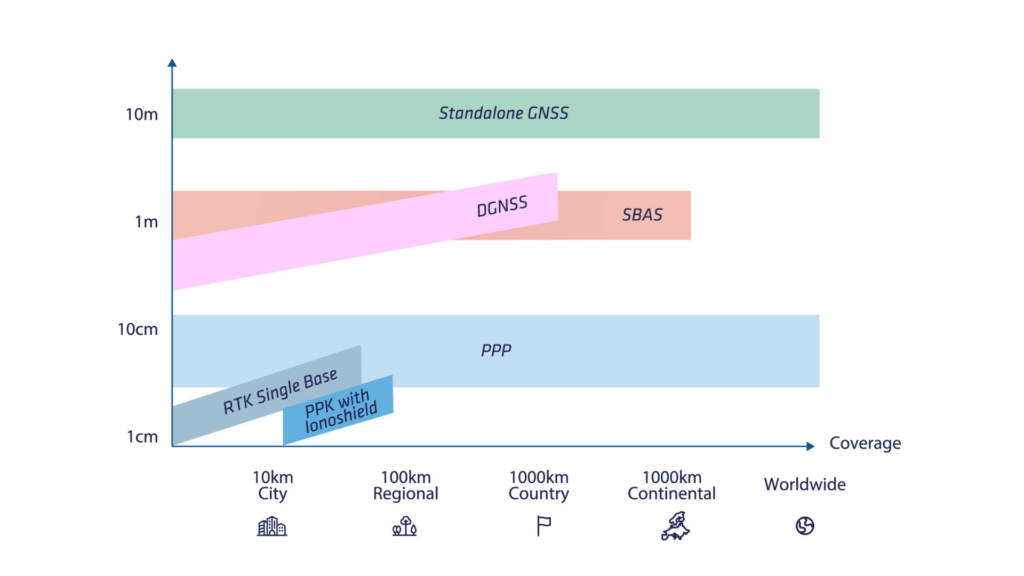
In an everyday scenario, the accuracy of standalone Global Navigation Satellite System (GNSS) is more than sufficient to help someone find their way, but many applications require a higher accuracy. Many differential corrections technologies have been developed to improve the accuracy of GNSS to within 1cm; enabling a wide range of new applications.
Achieving such accuracy requires attention to the reference frame used for calculations and positioning results, a topic covered in Geodesy and Datum Transformations, which is beyond the scope of this article.
GNSS corrections
Improving GNSS accuracy relies on correcting various errors.
There are many types of corrections that provide different levels of coverage and performance.
The main ones are detailed in the table below. In this article, we will cover the basics of the most common corrections: a brief explanation of DGNSS, followed by in-depth explanations of SBAS and RTK; and describe the benefits of PPK.
The next article in this series will take a closer look at Ionoshield and PPP in more detail.
Differential GNSS (DGNSS)
Traditional code-based DGNSS makes a simple assumption: satellite errors and local atmospheric errors are assumed to be the same in small areas. A pair of GPS receivers can then be used to cancel out both atmospheric (ionospheric and tropospheric) and satellite errors, thereby improving navigation performance.
In this mode of operation, a base station GNSS receiver is installed within a few kilometers of the rover’s GNSS receiver operating range. The base station transmits a set of corrections to the rover receiver using an RF or GSM modem. The rover receiver can then use these corrections to calculate a differential position (relative to the base station).
This technique can improve navigation accuracy to the sub-meter level, but is now obsolete as RTK has become the standard for high accuracy positioning.
SBAS (Satellite Based Augmentation System)
SBAS was developed to enable safe navigation of civil aircrafts. It has since been used for many other end-user applications that require greater accuracy than a stand-alone GNSS receiver.
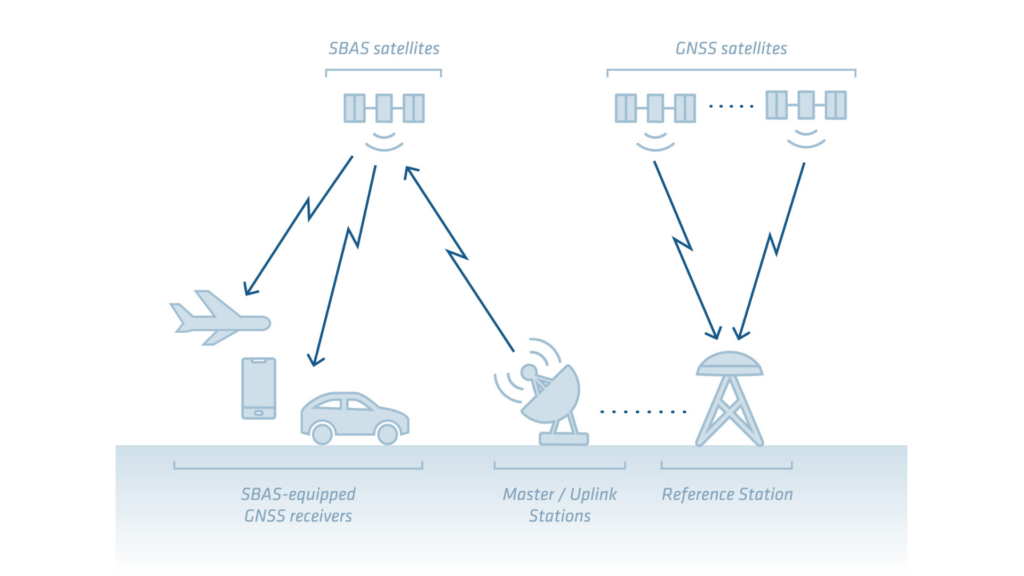
The concept of SBAS is to use a network of reference stations to calculate corrections that can improve GPS performance over a wide area (continental coverage).
These corrections are then broadcast by dedicated SBAS geostationary satellites. Modern GNSS receivers can track these corrections directly through their regular GNSS antenna and use them in their positioning engine, such as , SBAS that delivers an accuracy of 1 meter.
The main objective of all SBAS constellations is not to achieve maximum accuracy, but to enable GNSS to achieve minimum accuracy for the intended application (aircraft navigation and landing) with an added concept of integrity (accurate measurement of position error).
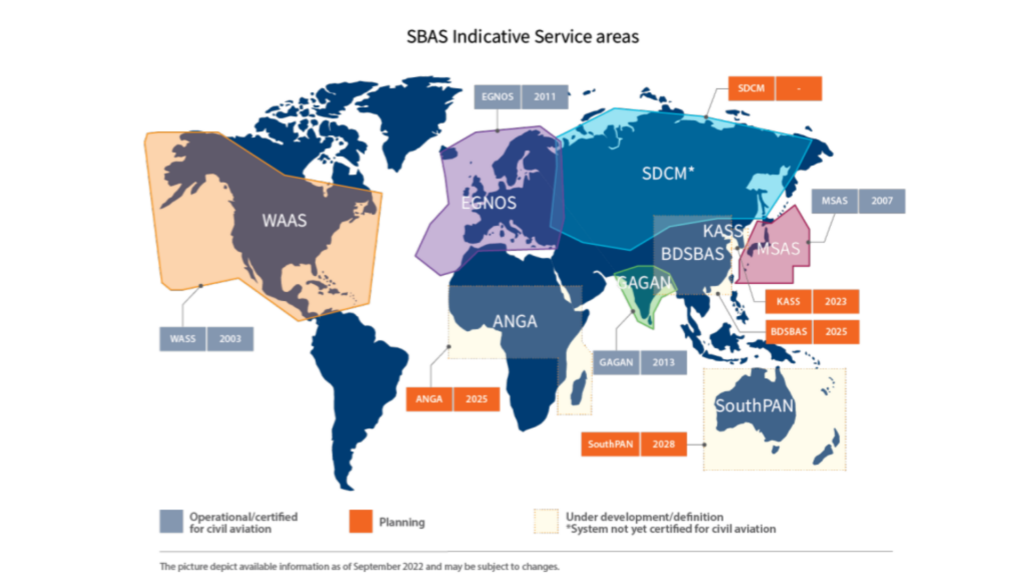
SBAS currently in use include:
- WAAS for northern American countries
- EGNOS for Europe
- GAGAN for India
- MSAS for Japan
However, most current SBAS only provide corrections for the GPS constellation, making them sub-optimal for land navigation. Future SBAS solutions (e.g. EGNOS V2) will provide multi-constellation corrections.
Technology behind SBAS
The various SBAS solutions use the same underlying technology to provide corrections. They provide corrections for:
- Satellite clock errors
- Satellite orbit deviations
- Atmospheric errors
SBAS also provides satellites integrity information which can be used to reject data from malfunctioning satellites.
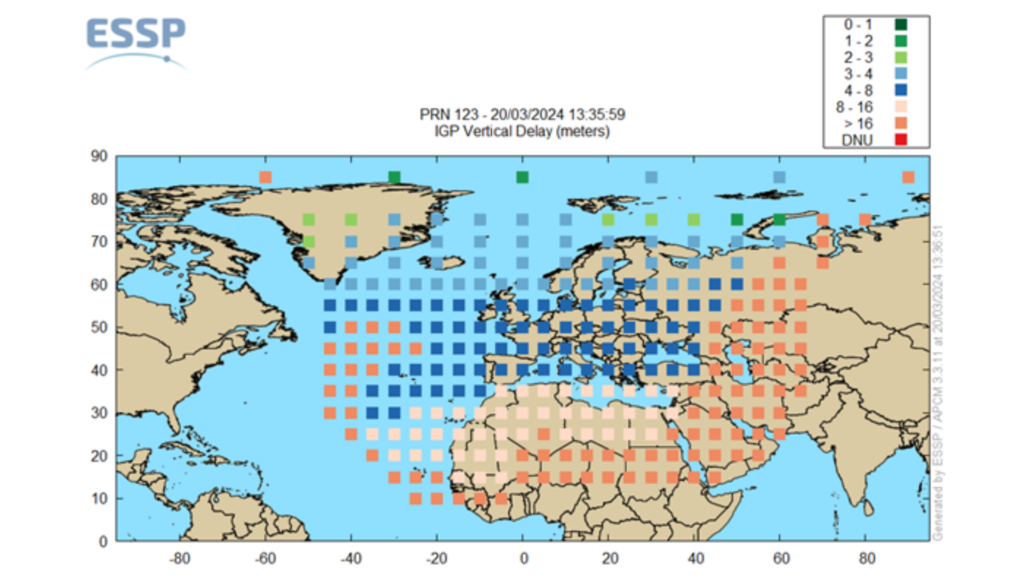
Atmospheric corrections are also computed using the network of base stations to provide a pattern of the atmospheric errors. The error value transferred corresponds to the vertical delay introduced by the atmosphere at given points called IGP (Ionospheric Grid Points). The receiver can then correct for the delay for the different signals from each satellite.
Using the information provided by SBAS, the receiver can correct for errors in the pseudorange-based measurement, improving the accuracy of the position to approximately 1.2m RMS horizontal and 1.6m RMS vertical. This is a significant improvement over standalone GNSS, especially for the vertical component.
Real Time Kinematic (RTK) and Post-Processed Kinematic (PPK)
RTK technology was first introduced for surveying applications in the mid-1990s . Like the traditional Differential Global Positioning System (DGPS), the RTK relies on a precisely located base station and rover GNSS receivers.
Two key computation steps enable a centimeter-precise positioning:
- Double difference
- Carrier phase measurement and ambiguity fixing
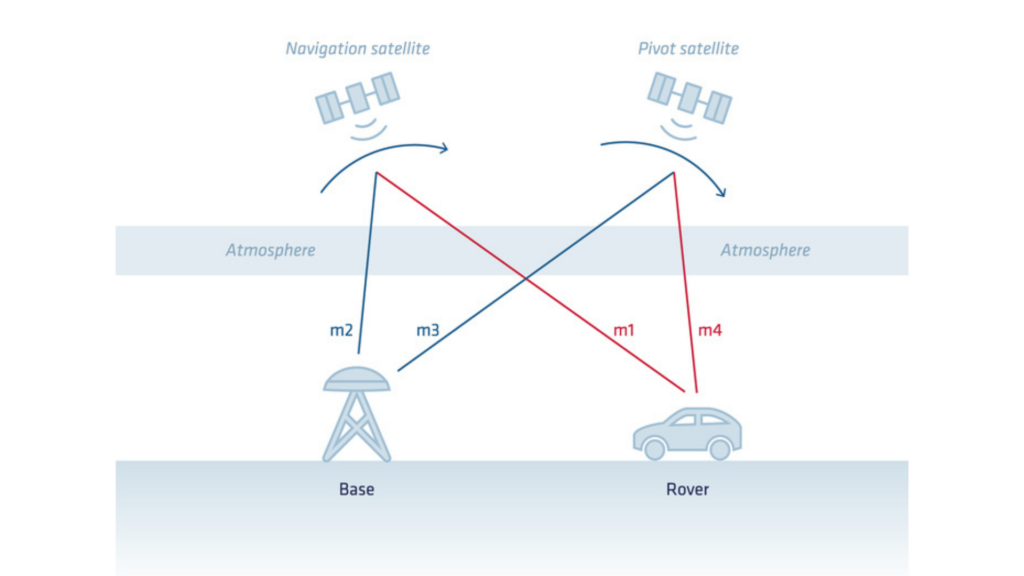
Double difference
DGPS generally uses only single difference and code measurements.
On the other hand, RTK adds phase measurements and uses a “double difference” approach. In this method, the base measurements are subtracted from the rover measurements, and all the navigation satellite measurements are subtracted from a pivot satellite.
This approach can compensate for all satellite induced errors, receiver induced errors, as well as the atmospheric errors that are assumed to be constant in the vicinity of the base station.
From this calculation we get:
- The position of the rover (latitude/longitude/altitude) in the datum of the base station
- The time of the rover
The distance between the base station and the rover is called the baseline and is a key factor in RTK. As the baseline increases, the error budget increases marginally because the common atmospheric errors and the common satellite orbit errors are not completely cancelled. This is the typical “+1ppm” seen in the RTK position accuracy specifications.
Carrier phase measurement and ambiguity fixing
The carrier phase measurement, introduced in our previous article is required to reduce the errors to the centimeter level.
The challenge with carrier phase measurements is that they are inherently ambiguous (or incomplete). There is an integer number of carrier phase cycles missing from the measurement. This missing part is also known as “ambiguity”.
The Real-Time Kinematic (RTK) positioning process starts by estimating these ambiguities. This process is also known as the “RTK Float” mode. In this mode, the ambiguities slowly converge but are not integer values. This allows the receiver to smooth the position and achieve approximately decimeter level accuracy.
To achieve maximum accuracy and robustness, the next step is to identify the integer value for each of these ambiguities in real-time. This process is called integer ambiguity resolution.
The result of ambiguity resolution maximises RTK accuracy and provides greater robustness. This is commonly referred to as “RTK Fixed” mode.
If the phase tracking to a particular satellite is interrupted, a ‘cycle slip’ event occurs and the integer ambiguity for that satellite must be resolved again. For this reason, too many cycle slips (and especially cycle slips on all satellites at the same time) have a negative effect on RTK performance. A good antenna and antenna placement and a clean RF environment are essential to limit these events.
Post-processing Kinematics
As we have seen, RTK is the application of these corrections “in real time”, which means that the rover must have a data link connection to the base station in order to calculate the RTK processing in the field.
Some applications do not need the trajectory in real time, but could benefit from a higher accuracy, or a simpler setup. Post Processing Kinematic (PPK) can meet those needs. With PPK, the rover collects its own raw GNSS data during data collection without receiving real-time corrections. Later, this data is post-processed using precise information from a base station or a network of reference stations.
PPK allows more flexibility in data collection because it doesn’t rely on real-time corrections. It is often used in scenarios where real-time communication is difficult or unnecessary, such as aerial mapping, drone surveying or scientific research.
Advantages of using PPK for differential corrections.
PPK offers the following key benefits when processing GNSS:
- Improved field workflow: A major cost of an RTK-based mission is ensuring that a base station is nearby, setting up a base station if required, ensuring a reliable data connection, etc. Qinertia has a large number of built in CORS networks; and direct access to third party networks. This eliminates the complexity of ensuring the availability of a base and setting up a reliable data connection.
- Improved quality control: Many quality indicators help to assess the actual performance of a processing. These include advanced statistics, separation (difference between the position/attitude computed during the forward and the backward processing), as well as GNSS signals indicators.
- Overall improved performance: RTK ambiguity resolution can take some time (from a few seconds to a few minutes depending on the distance to the base station and atmospheric conditions). This can be significant at the start of an acquisition or in challenging GNSS conditions. PPK mitigates these effects by processing in both forward and backward directions to maximize the fix rate. Performance can also be improved by using more advanced algorithms or by using accurate satellite ephemeris.