
In this first article of our “Mastering Accuracy” series, we will explore Global Navigation Satellites Systems (GNSS) and their stand-alone accuracies taking into account GNSS and their error sources
What is a GNSS system?
Satellite-based positioning systems, like GPS, have become omnipresent, guiding us on our car journeys and our treks. They also play a critical role in various applications as diverse as autonomous vehicles, agriculture, and surveying.
However, it is important to move from the term “GPS” to the more inclusive “GNSS” (Global Navigation Satellite System), which encompasses all satellite constellations beyond just GPS.
There are four global satellite constellations in operation (GPS, GLONASS, GALILEO, BEIDOU). Additionally, there are supplementary constellations that serve local regions, like India’s IRNSS, or complement the global ones, such as Japan’s QZSS.
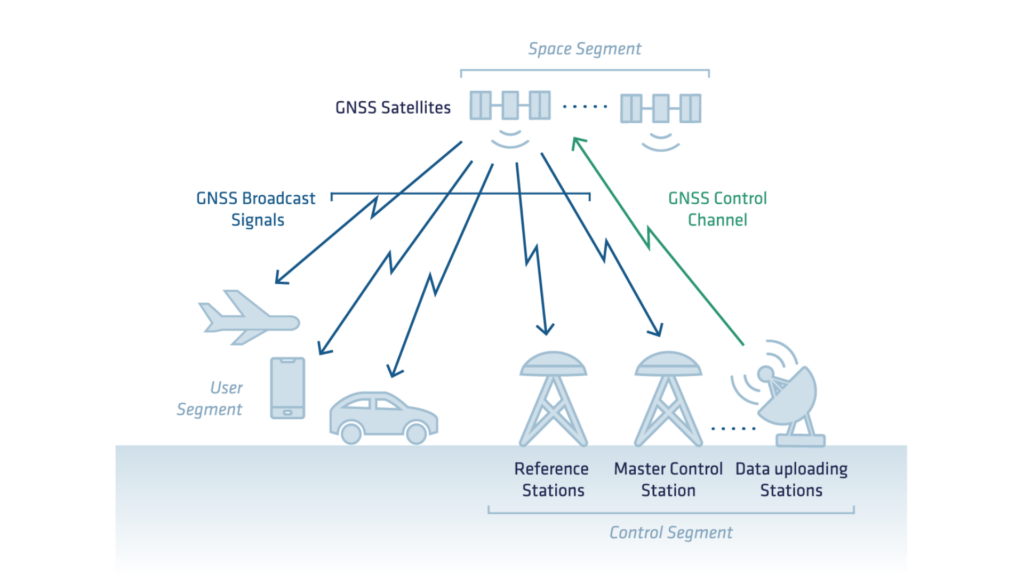
Apart from satellites, a GNSS system comprises of other essential segments:
- The satellite segment, which comprises the satellite constellation.
- The control segment, consisting of ground control stations and equipment. These are responsible for monitoring the constellations, determining the position of the satellites, and ensuring their continuous and correct operation.
- The user segment, which involves equipment used to calculate a position based on the signals received from the satellites.
GNSS fundamental principle: Trilateration
GNSS determines a receiver’s position and time through trilateration, using signals from multiple satellites.
To calculate a position, the system must solve four variables: latitude, longitude, altitude, and time. This process requires at least four satellites, though additional satellites improve accuracy and reliability.
The following image illustrates how trilateration works. Each satellite defines a sphere around itself, representing the possible distances to the receiver.
A second satellite narrows the possible solutions to the intersection of these two spheres. A third satellite further refines the solution, allowing the system to pinpoint a single location. In real applications, the system must also account for time, which necessitates a fourth satellite.
Signal emitted by the satellites
The GNSS satellites transmit signals across various frequency bands such as L1, L2, L5, among others. There are three basic components of GNSS signals:
- Navigation data (low frequency): computed by the control segment, this data includes essential information such as ephemeris data (Keplerian orbital parameters necessary for calculating satellite positions), clock correction data, and supplementary information. Uploaded to the satellite and broadcasted globally to GNSS receivers.
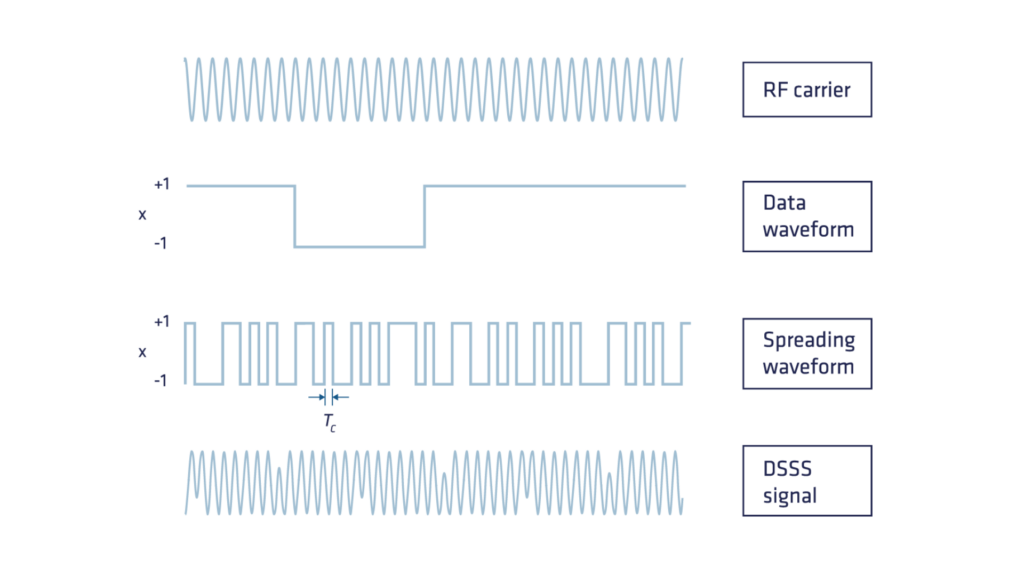
- Pseudorandom noise code or PRN code: Each satellite transmits a unique pseudorandom noise (PRN) code, a high-frequency deterministic sequence of 0s and 1s designed with a predictable pattern so the receiver can replicate it. The key advantage of adding the PRN code is that it allows multiple satellites to transmit signals in the same frequency simultaneously and be recognizable by the receiver. This technique, known as Code Division Multiple Access (CDMA), assigns each satellite a unique pseudo-random code. Only Glonass uses FDMA (Frequency Division Multiple Access) where each satellite has a slightly different frequency.
- RF carrier wave: a sinusoidal signal originally designed to transport the combined signal of navigation data and the PRN code. We will see later how this component evolves to become the foundation of the GNSS signal, enabling centimeter-level positioning accuracy.
Measuring distance to the satellite: code and carrier phase
Originally, the GPS system was designed so that the receiver utilizes a PRN code replica and auto-correlation techniques to compute the satellite-to-receiver range with submeter accuracy. However, the carrier wave, initially intended for PRN code transmission, proved to be a valuable asset.
Carrier phase measurement, though more precise, introduced ambiguity in determining the distance between the satellite and the receiver. Further exploration of both measurements is presented below.
Satellite-to-receiver range computation with PRN Code
The GNSS receiver uses a process called “Delay Lock Loop” to determine the time delay between the transmitted code and the received code. This time delay, which corresponds to the signal propagation time, is then converted into a distance by multiplying it by the speed of light.
However, due to unsynchronized receiver and satellite clocks, the resulting distance is called pseudorange. In addition to the clock synchronization error, the pseudorange is affected by several other errors related to the propagation environment (atmosphere, hardware, etc.), which will be discussed later in the article.
Satellite-to-receiver range improvement: Carrier phase measurement
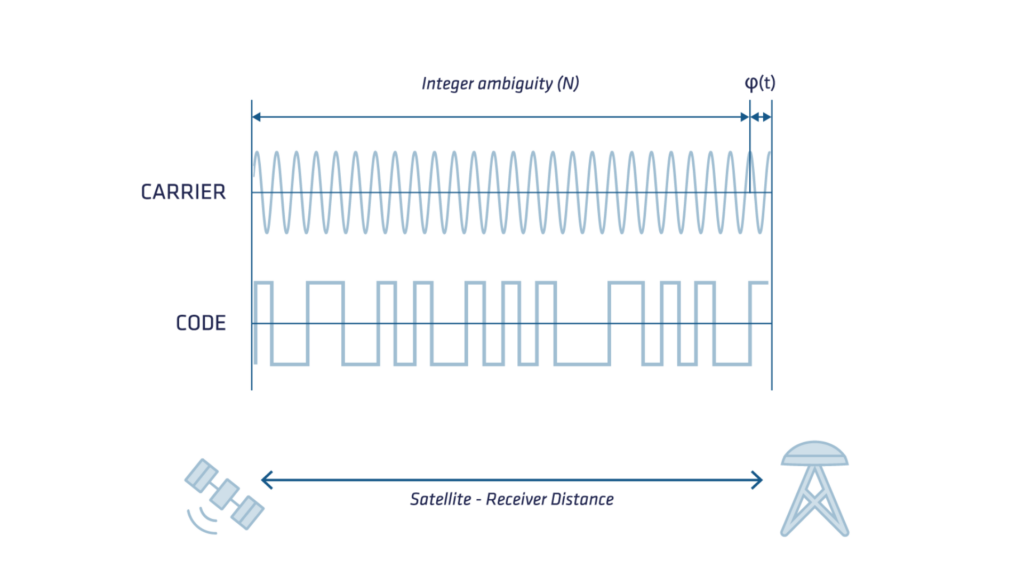
The distance between the satellite and the receiver can also be determined by counting the number of phase cycles elapsed between the signal emission and reception and multiplying this by the carrier wavelength.
This measurement is two orders of magnitude more precise than the code, but a constant unknown integer number of cycles (also known as ambiguity) affects its absolute accuracy. To determine the precise evolution of the carrier phase, the GNSS receiver accumulates the Doppler frequency shifts in the carrier wave, caused by the satellite to receiver relative motion.
In case of signal disruption, this accumulation process cannot account for the actual motion and abrupt jumps in the measurement, also known as “cycle slips,” can be observed.
Correctly handing the cycle slips, and the ambiguity are challenging and key aspects of precise positioning techniques such as Real Time Kinematics (RTK) and Precise Point Positioning (PPP).
The following diagram shows the signal carrier wave, the code and their respective resolutions.
Sources of errors in GNSS
The initial general public accuracy (non-military) of GPS was around 100m. Following the multiple years of evolutions (removal of selective availability, deployment of new constellations and SBAS systems, new satellites, and new frequencies,) the accuracy of standalone GNSS is now between 5m for entry level GNSS receivers, down to 1m for high-end ones.
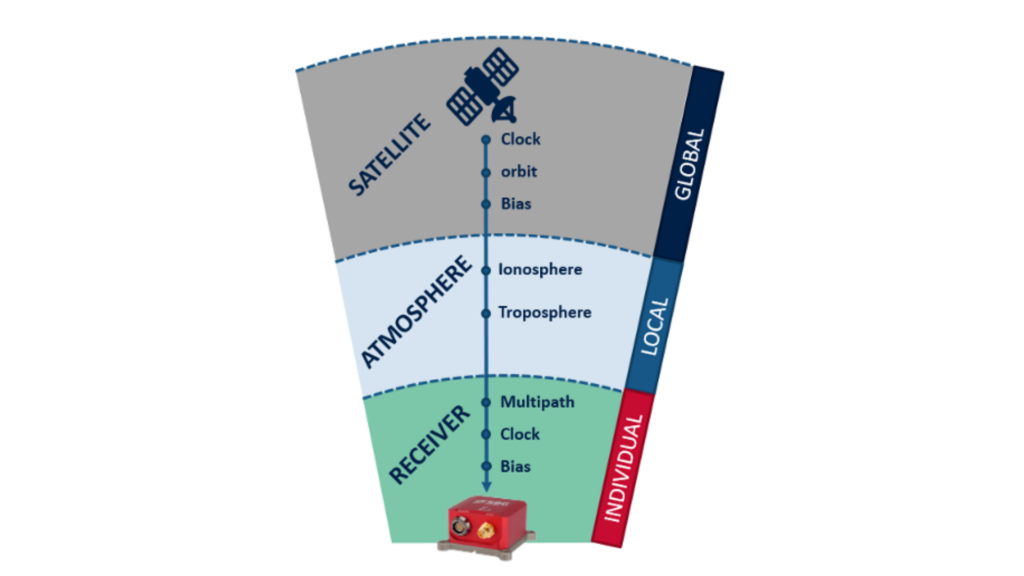
Satellite errors
- Clock errors: While the atomic clocks on GNSS satellites are highly precise, they experience minor drift. Unfortunately, even a slight deviation in the satellite clock can lead to a substantial discrepancy in the calculated position by the receiver. For instance, a mere 10 nanoseconds of clock error translate to a position error of 3 meters on the range measurement!
- Orbit errors: While GNSS satellites follow highly precise and well-documented orbits, these orbits undergo minor variations, similar to the satellite clocks. Like clock inaccuracies, even a slight change in the satellite orbit can cause a significant error in the calculated position. Residual errors in the orbit persist, contributing to potential position errors of up to ±2.5 meters.
Atmospheric Errors
- Ionospheric Delay: Situated between 50 to 1,000 km above the Earth, the ionosphere contains charged ions affecting radio signal transmission, causing position errors (typically ±5 meters, higher during heightened ionospheric activity). Ionospheric delay varies with solar activity, daytime, season, and location, making predictions challenging.
- Tropospheric Delay: The Earth’s immediate atmospheric layer, the troposphere, sees variations in delay due to shifts in humidity, temperature, and atmospheric pressure.
Receiver errors
The receiver’s internal clock, which are less accurate when compared to the satellite’s atomic clock, along with other hardware and software errors add noise and bias to the measurements.
| Delay | Origin | Magnitude |
|---|---|---|
| Position Error | Satellite | 5m |
| Clock Offser | Satellite | 0-300 km |
| Instrumental Delay | Satellite | 1-10 m |
| Relativistic Effect | Satellite | 10 m |
| Ionospheric Delay | Path (50-1000 km) | 2-50 m |
| Tropospheric Delay | Path (0-12 km) | 2-10 m |
| Insturmental Delay | Receiver | 1-10 m |
| Clock Offset | Receiver | 0-300 km |
To ensure optimal navigation, the system must account for these errors, mitigate them using a specific error model, or estimate them through the navigation filter.
Position computation should also consider many other error terms not listed in this article, such as tidal effects and relativistic effects.
Various error sources influence the performance of GNSS technology, which provides highly accurate positioning, navigation, and timing.
Factors such as atmospheric delays, satellite clock and ephemeris errors, multipath interference, and receiver noise can degrade accuracy. While modern correction techniques (differential GNSS, RTK and PPP) help mitigate GNSS and their error sources, understanding their origins remains essential for optimizing GNSS performance.
As advancements in signal processing, sensor fusion, and machine learning continue to evolve, GNSS systems will become even more robust, ensuring greater reliability across diverse applications.
