慣性計測ユニットIMU)は、現代のナビゲーションやモーショントラッキングシステムにおける基本的なコンポーネントである。
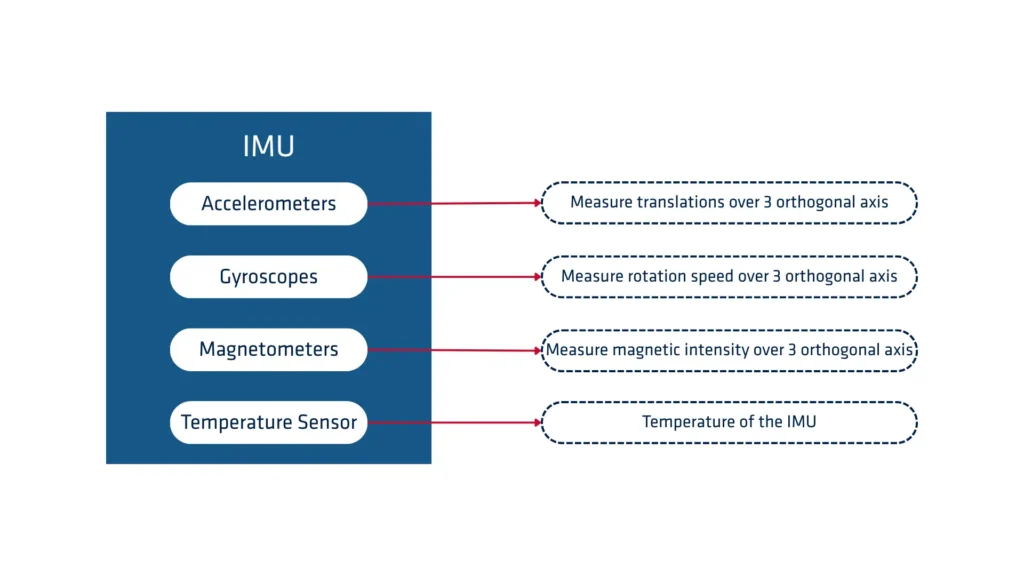
慣性計測ユニットIMU)は、加速度計、ジャイロスコープ、場合によっては地磁気計を組み合わせて使用することで、身体の特定の力、角速度、場合によっては身体を取り巻く磁場を測定し、報告する電子機器である。
IMUは、航空機や船舶からスマートフォンやゲームコントローラーに至るまで、さまざまな物体の位置や向きを追跡・制御するために不可欠である。
IMU センサーには、FOG (光ファイバージャイロスコープ)に基づくもの、RLG IMU(リングレーザージャイロスコープ)、そして最後にMEMS技術(Micro Electro-Mechanical Systems)に基づくIMU 種類がある。この技術は、性能を確保しながら、低コストと低消費電力を可能にする。そのため、MEMSベースのシステムは、高性能と超低消費電力を小型のユニットで兼ね備えている。
システムは、要求の厳しいリアルタイム・アプリケーション向けに1KHzで生データを出力する。
最適なIMU 選ぶには?
ニーズに最適なIMU 選択する際には、高精度、高信頼性、高性能を確保するために、いくつかの要素を考慮する必要があります。
高品質のIMUは、バイアス、ドリフト、ノイズが低く、提供するデータが正確で長期間安定していることを保証します。また、校正も非常に重要です。校正の行き届いたセンサーは、特に動的な環境において、誤差の蓄積を最小限に抑えます。
IMU センサーの範囲と分解能も重要です。アプリケーションによっては、過酷な条件に対応するために広いダイナミックレンジを持つIMU 必要になる場合もあれば、より小さなモーションで正確な測定を行うために高分解能のIMU 必要になる場合もあります。
消費電力も、特にドローンや自律走行車のようなバッテリー駆動のシステムにとっては重要な検討事項です。低消費電力のIMU であれば、稼働時間を延ばし、エネルギーコストを削減できるため、長時間のミッションに効率的です。
耐久性は不可欠です。防衛や航空宇宙で使用されるような過酷な環境用に設計されたIMUは、温度変動、振動、衝撃に耐える堅牢性が求められます。さらに、フォームファクターと統合の互換性も考慮してください。
小型で軽量なIMUは、携帯機器や無人システムに最適ですが、より堅牢なアプリケーションには大型のシステムが必要です。
最後に、高性能なIMUを提供してきた実績のある信頼できるメーカーを選ぶことで、精密で正確なモーショントラッキングのニーズを満たす信頼性の高い製品を入手できます。