
ジャイロスコープは、慣性系に対する回転速度を測定するセンサーです。したがって、回転時のその後の方向の変化をすべて捉えます。さらに、地球の座標系自体が回転しているため、地面に置かれたジャイロスコープも地球の回転速度(約1時間あたり15°)を検出します。ジャイロスコープは通常、出力を度/秒(°/s)またはラジアン/秒(rad/s)で表します。
どのように機能しますか?
実用的なアプリケーションでは、システムは高周波数で回転角速度を統合し、センサーの姿勢を非常に高精度で決定します。したがって、この原理は、垂直ジャイロスコープ、姿勢方位基準システム (AHRS)、モーションリファレンスユニット (MRU)、および慣性航法システム (INS) を含む、すべての慣性センサーの基礎を形成します。
さらに、これらはINSの枠組みにおいて位置と速度を決定する上で重要な役割を果たします。加えて、最高性能のジャイロスコープ(通常、クローズドループ光ファイバージャイロスコープ (FOG))は、バイアス推定を必要とせずに地球の自転を直接測定します。その結果、これらのセンサーは外部参照に依存することなく方位を決定でき、これはジャイロコンパス機能として知られています。しかし、方位を決定するための代替技術も存在し、これによりこの技術への厳しい制約が緩和されます。
ジャイロスコープにおけるコリオリとサニャック効果
動作原理に関して、SBG Systems 、回転を測定するために「コリオリ効果」と「サニャック効果」という2つの主要な物理的効果を利用しています。具体的には、MEMSジャイロスコープではコリオリ効果が用いられています。証明質量がX方向に振動すると、垂直なZ軸を中心とした回転によって力が発生し、それがY軸に沿った動きを引き起こします。
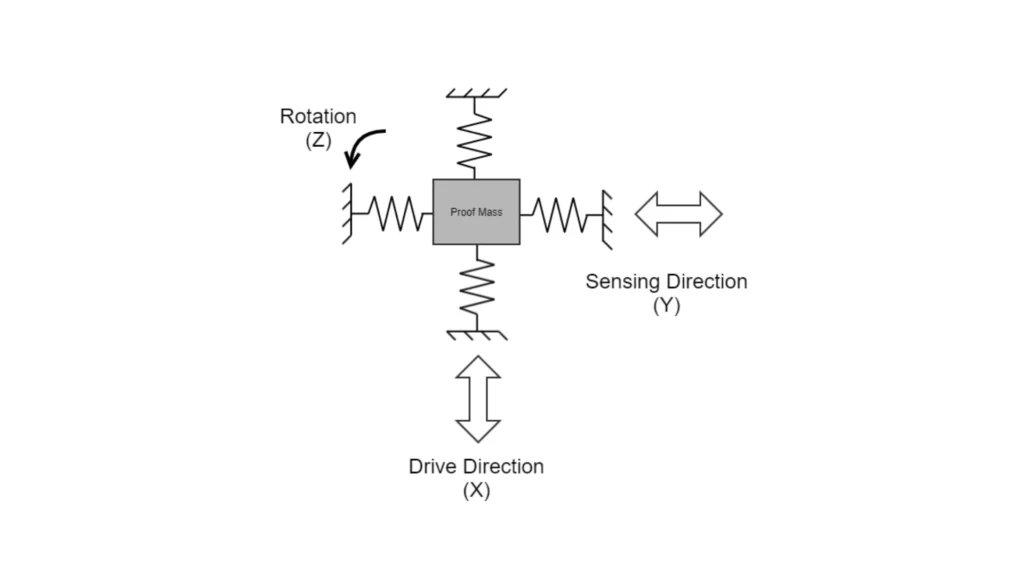
したがって、いくつかのMEMSアーキテクチャは、通常、振動ビームまたはリングを使用して、この原理を実装しています。特に、これらのジャイロスコープの実際の性能は、MEMS素子のサイズや品質、センサーパッケージ、機械的および信号処理技術などの要因によって異なります。
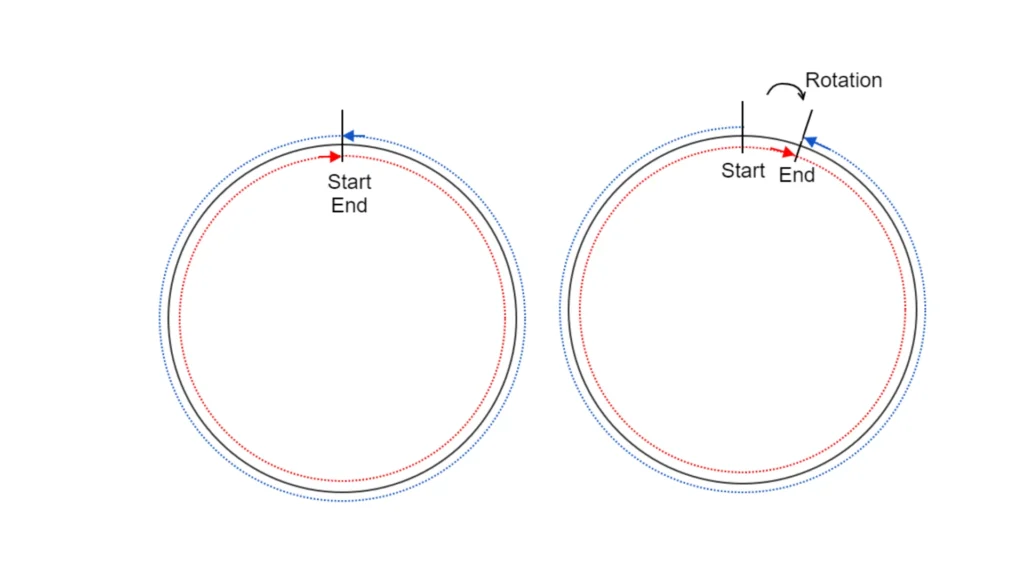
FOGなどの光ファイバージャイロは、サニャック効果を利用して回転を測定します。この方法では、2つの光源が反対方向にループします。1つは時計回りで、もう1つは反時計回りです。回転がない場合、光波は同時に到達しますが、回転中には、一方の経路が長くなり、もう一方の経路が短くなります。その結果、干渉が発生し、これを測定して角速度を導き出すことができます。
慣性航法におけるジャイロスコープのアプリケーション
これらの原理が組み合わさることで、ジャイロスコープは、幅広いアプリケーションにおいて、正確で信頼性の高いモーションデータを提供できます。
航空
航空では、これらは航空機のナビゲーションと安定性にとって非常に重要です。これらは、次のシステムで使用されます。
- 姿勢指示器:これらの計器は、航空機の姿勢を水平線に対して表示し、パイロットが適切なピッチ角とロール角を維持するのに役立ちます。
- 自動操縦システム:ジャイロスコープは自動操縦システムにフィードバックを提供し、航空機の機首方位、高度、コースを自動的に制御できるようにします。
- 慣性航法システム(INS):INSは、航空機の動きと姿勢を追跡するためにジャイロスコープを利用し、GPS信号が利用できない場合でも正確な位置情報を提供します。
海上ナビゲーション
海上ナビゲーションに関して、ジャイロスコープは船舶と潜水艦の安定性とコースの維持を支援します。
- ジャイロコンパス: ジャイロコンパスは、地球の磁場に依存せずに正確な方向情報を提供し、航海者が安定したコースを維持するのに役立ちます。
- 安定化システムは、これらのセンサーを使用してローリングやピッチングを軽減し、乗客の快適性を高め、安全性を確保します。
宇宙
宇宙船や人工衛星にとって、ジャイロスコープは姿勢制御に不可欠です。
- 姿勢制御システム:ジャイロスコープは、宇宙船の姿勢制御を支援し、ドッキング、位置決め、操縦などのタスクに不可欠な回転運動の正確な測定を提供します。
- 慣性計測装置(IMU):ジャイロスコープを含むIMUは、宇宙空間での正確な位置特定と制御を保証するために、ナビゲーションと安定化を提供します。
