


AHRS – 姿态和航向参考系统
姿态和航向参考系统 (AHRS) 是现代航空和海上导航中的一项关键技术。 它提供有关飞机或船舶的姿态和航向的重要信息,确保安全准确的导航。
它也称为运动参考单元 (MRU)。
什么是姿态和航向参考系统 (AHRS)?
姿态和航向参考系统 (AHRS) 是一种集成系统,可提供三维姿态数据,包括横摇角、纵倾角和偏航角,以及航向信息。 此数据对于飞行员和导航员保持控制和情境感知至关重要。 AHRS 结合了多个传感器,以提供准确可靠的姿态信息。
AHRS 的组成部分
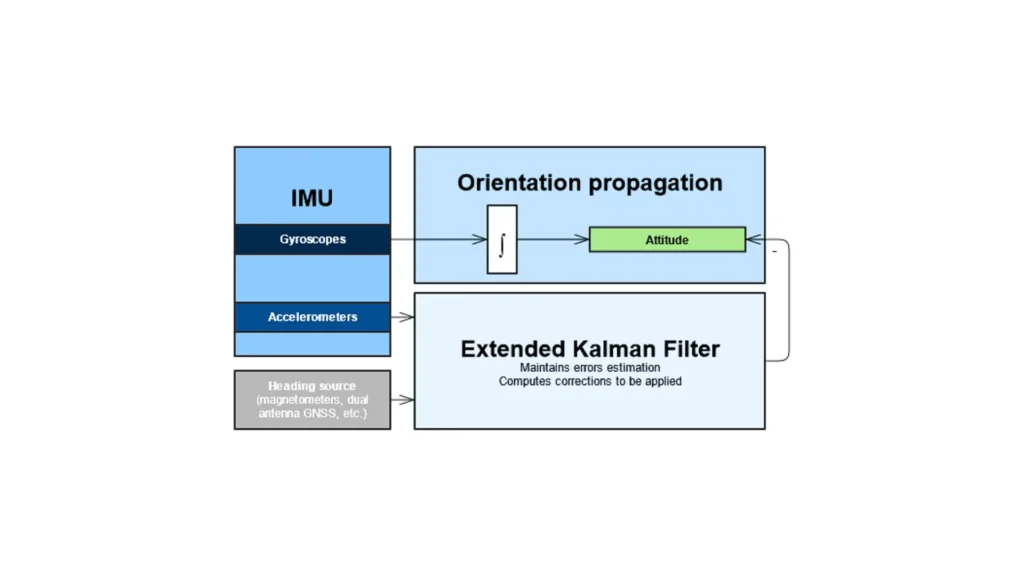
AHRS 通常包含几个关键组件:
- 陀螺仪:测量绕三个主轴(横滚、纵倾和偏航)的角速度。
- 加速度计:测量线性加速度,有助于确定相对于地球重力的姿态。
- 磁力计:测量地球磁场以提供航向精度信息。
- 微处理器:处理传感器数据以计算精确的方向和航向精度信息。
AHRS 的重要性
AHRS 对于以下应用至关重要:
1 – 稳定性和控制:确保飞机或船舶保持所需的方位和航向精度。
2 – 导航:提供准确的方位数据以进行精确导航。
3 – 安全:增强情境感知并降低迷失方向的风险。
AHRS 结合了来自陀螺仪、加速度计和磁力计的数据,以提供全面的姿态和航向信息。该系统使用先进的算法来处理传感器数据,并校正误差和漂移。
应用范围
AHRS 在航空、航海导航和其他需要精确姿态和航向信息的领域具有广泛的应用。
在航空领域,AHRS 是现代航空电子系统的重要组成部分。它为飞行员提供关于飞机姿态和航向的实时信息,从而实现安全和精确的导航。显示在主飞行显示器 (PFD) 上的数据增强了情境感知并减少了飞行员的工作量。此外,运动传感器与自动驾驶仪系统的集成实现了自动飞行控制和稳定性增强。
同样,在航海导航中,AHRS 在为船舶提供姿态和航向信息方面起着至关重要的作用。在恶劣的海况下,精确的姿态数据对于保持稳定性和控制至关重要,因此它尤其有价值。在这些应用中,AHRS 有助于导航、航线标绘和自动驾驶系统。
此外,AHRS 广泛应用于无人飞行器 (UAVs) 或无人机。它提供了稳定飞行和精确机动所需的必要姿态和航向数据。通过将 AHRS 与自动驾驶仪系统集成,UAV 可以实现自主飞行能力,从而提高无人机运行的可靠性和效率。
在机器人技术中,AHRS 系统对于向移动机器人和机械臂提供姿态和航向信息是不可或缺的。精确的姿态数据对于需要精确运动和定位的任务至关重要。这种能力显著增强了机器人在动态环境中导航和执行复杂任务的能力。
在您的项目中使用运动传感器
AHRS 是一项至关重要的技术,可为各种应用(包括航空、航海导航、UAV 和机器人技术)提供准确可靠的姿态和航向信息。
通过结合来自陀螺仪、加速度计和磁力计的数据,它可以提供全面而精确的姿态数据。
此外,用于传感器融合和误差校正的先进算法可确保系统的准确性和可靠性。随着技术的进步,这些系统将继续在增强多个领域的导航和控制方面发挥关键作用。
