


IMU – Centrale de Mesure Inertielle
Les centrales de mesure inertielles (IMU) sont des composants fondamentaux dans les systèmes modernes de navigation et de suivi de mouvement.
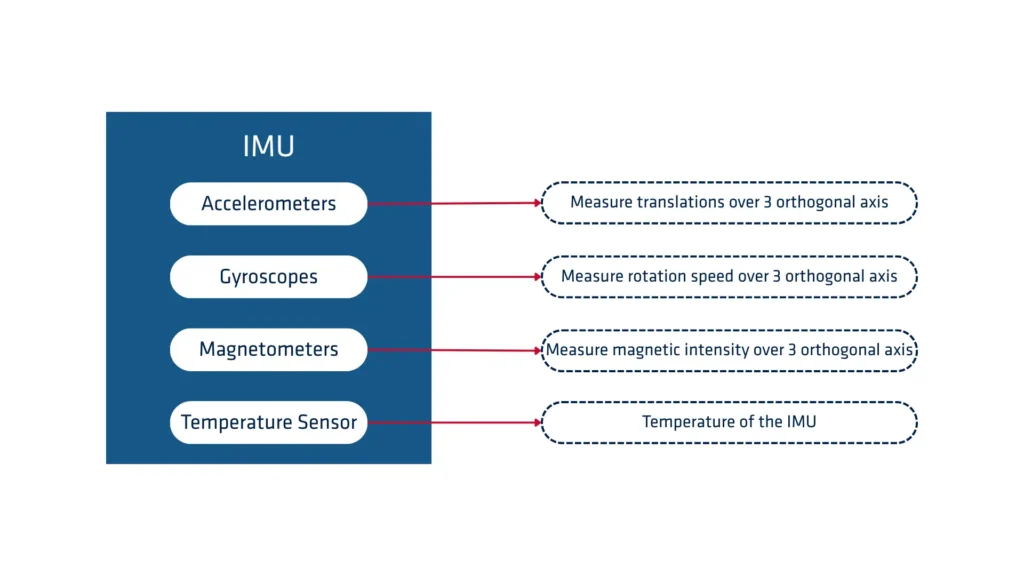
Une centrale de mesure inertielle (IMU) est un dispositif électronique qui mesure et rapporte la force spécifique, la vitesse angulaire d'un corps, et parfois le champ magnétique environnant le corps, en utilisant une combinaison d'accéléromètres, de gyroscopes, et parfois de magnétomètres.
Les IMU sont essentielles pour suivre et contrôler la position et l'orientation de divers objets, des aéronefs et navires aux smartphones et aux contrôleurs de jeux.
Il existe différents types de capteurs IMU : ceux basés sur la technologie FOG (Fiber Optic Gyroscope), les IMU RLG (Ring Laser Gyroscope), et enfin, les IMU basées sur la technologie MEMS (Micro Electro-Mechanical Systems). Cette technologie permet de réduire les coûts et les besoins en énergie tout en assurant la performance. Les systèmes basés sur la technologie MEMS combinent donc haute performance et très faible consommation d'énergie dans une unité plus petite.
Le système fournit des données brutes à 1 KHz pour les applications temps réel exigeantes.
Comment choisir la meilleure IMU ?
Lors du choix de la meilleure IMU pour vos besoins, plusieurs facteurs doivent être pris en compte pour garantir une haute précision, fiabilité et performance. Le premier facteur est la précision du capteur, qui a un impact direct sur la précision des mesures.
Les IMU de haute qualité ont un faible biais, une faible dérive et un faible bruit, ce qui garantit que les données qu'elles fournissent sont précises et stables dans le temps. L'étalonnage est également crucial, car des capteurs bien étalonnés minimisent l'accumulation d'erreurs, en particulier dans les environnements dynamiques.
La plage et la résolution des capteurs IMU sont également importantes. Selon votre application, vous pouvez avoir besoin d'une IMU avec une large plage dynamique pour gérer des conditions extrêmes, ou d'une IMU avec une haute résolution pour des mesures précises dans des mouvements plus petits.
La consommation d'énergie est un autre élément essentiel, en particulier pour les systèmes alimentés par batterie comme les drones et les véhicules autonomes. Une IMU à faible consommation d'énergie prolonge la durée de fonctionnement et réduit les coûts énergétiques, ce qui la rend plus efficace pour les missions de longue durée.
La durabilité est essentielle. Les IMU conçues pour les environnements difficiles, comme celles utilisées dans la défense ou l'aérospatiale, doivent être suffisamment robustes pour résister aux fluctuations de température, aux vibrations et aux chocs. De plus, tenez compte du facteur de forme et de la compatibilité d'intégration.
Les IMU plus petites et plus légères sont idéales pour les appareils portables ou les systèmes sans pilote, tandis que les systèmes plus grands sont nécessaires pour les applications plus robustes.
Enfin, choisir un fabricant de confiance ayant fait ses preuves dans la fourniture d'IMU haute performance vous assure d'obtenir un produit fiable qui répond à vos besoins en matière de suivi de mouvement précis.
