OPSIA enhances its solution with Ekinox INS integration
Combining a Multibeam Echo Sounder and a Laser Scanner with the Ekinox INS.
“SBG Systems’ technical support was very competent and very helpful about how to configure the INS and how to proceed even for the use of the laser.” | OPSIA
About OPSIA
Opsia is a French engineering office of expert surveyors. For more than twenty years, the company has been conducting surveys of land, architecture, infrastructures, engineering, or hydraulic structures, cartography at all scales.
Opsia possesses unique know-how, at the crossroads of many disciplines, in the field of terrestrial and aerial topography. Its technologies and the skills of its engineers are put at the service of a very wide range of projects to satisfy the most diverse customers: local authorities, industrialists, individuals, in France and around the world.
Combining terrestrial scanning with MBES
The increasing demand for high-resolution 3D bathymetric surveys (INS GNSS) at ever-increasing depths requires constant innovation from industry stakeholders. With this arises one major challenge: the recalculation between the terrestrial and bathymetric 3D models.
OPSIA decided to take on the challenge and to solve this problem with a unique solution: combining a multi-beam echo sounder and terrestrial laser scanner.
Combining a MBES with a terrestrial laser scanner
The project consists in combining two different systems which are the MBES (Multi-Beam Echo Sounder) and a terrestrial laser scanner, both used with an Inertial Navigation System (INS).
The project was created with the idea of using different devices that the company already had (MBES, laser scanner, INS). By Combining the MBES system and MMS (Mobile Mapping System) it created an integrated solution for enhanced mapping capabilities.
By and combine them to obtain a combined solution of MBES system and MMS (Mobile Mapping System).
The solution
- The Teledyne Reson T20-P full-option multibeam echo sounder
- The FOCUS S150, a terrestrial laser scanner from Faro used as a Mobile Mapping System (MMS)
- The Ekinox-U INS from SBG Systems (IMU connected to a SplitBox GNSS now replaced by the Navsight Marine Solution) for both systems synchronization, motion compensation and data georeferencing.

MMS and MBES Synchronization
- The Multi-Beam Echo Sounder system
The Inertial Navigation System is used and integrated as recommended by Teledyne Reson, that is to say by inter-connecting the Portable Sonar Processor, the MBES, and the INS. A constant PPS signal synchronizes all devices for seamless operation. - The Mobile Mapping System
The MMS is combined with the INS thanks to the use of a unique PPS signal, sent through one of the serial ports available on the Splitbox, to start recording laser scanner data and another one to stop recording data. The “Event Marker” record of the first PPS signal enables time synchronization between INS data and laser scanner data.

The Ekinox INS is in the center of the whole system. The SplitBox connects the MBES, facilitating communication with the IMU and GNSS for integrated functionality. The Splitbox connects the laser scanner to retrieve timestamps for each rotation of its mirror.
Using another small electrical component (Arduino NANO), we synchronize both devices perfectly in time, achieving seamless operation.
Results and Insights
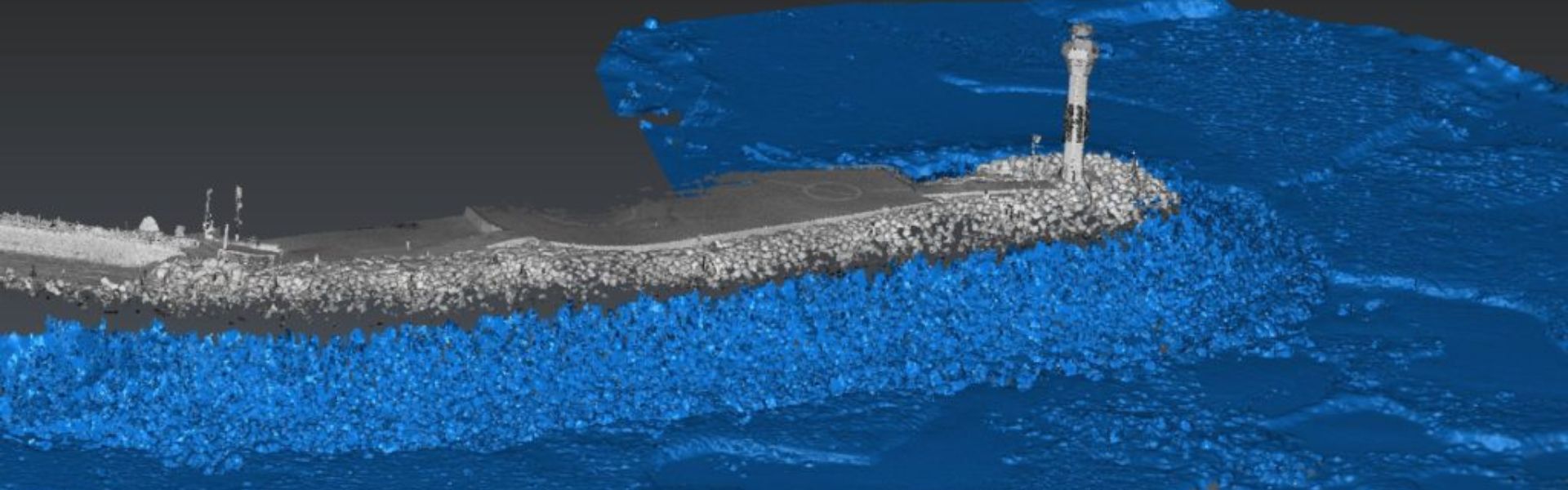
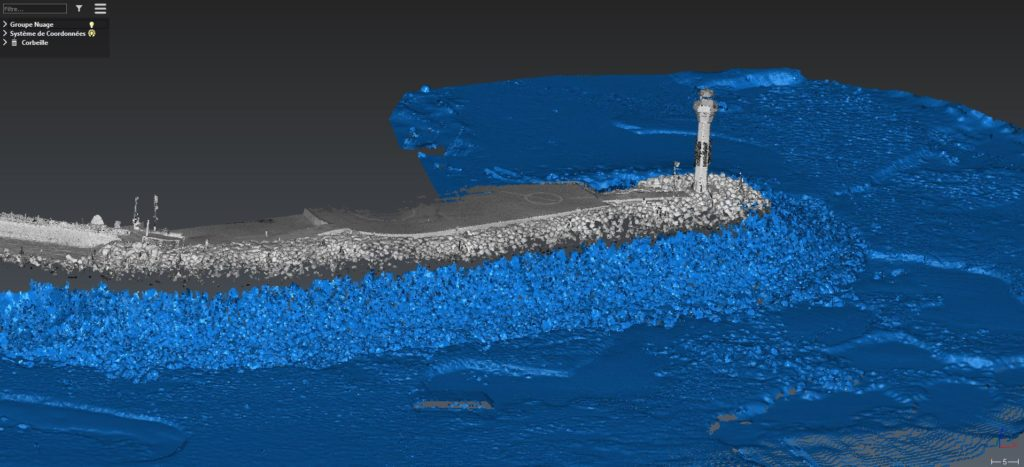
The results of the Mobile Mapping System are pretty good. While OPSIA did not have sufficient time to evaluate the precision of the system for now, the trajectory given by the INS system seems to be good, and the point cloud obtained by combining the laser scanner and the INS system seems to be good as well.
- The Ekinox-U matched with the use of the laser scanner.
- We have completed a significant portion of the project! The next step is to try to combine the MMS with the MBES, which seems to be a formality.
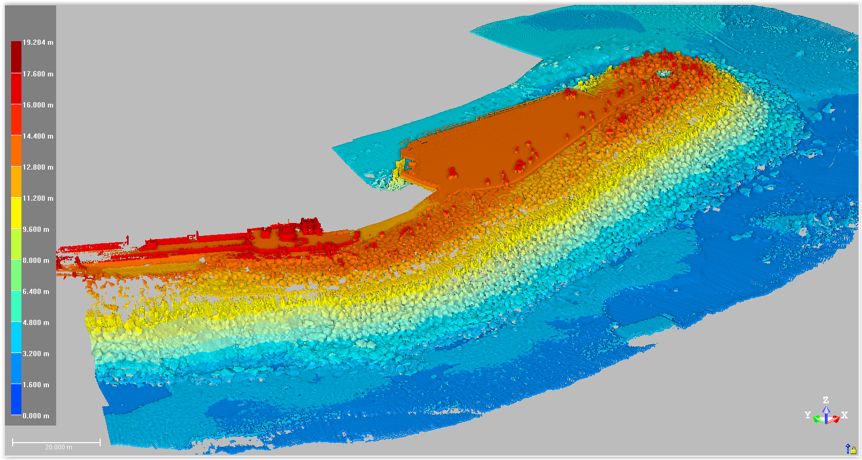
The results should be like the following seawall:
About the Ekinox-U SplitBox Solution
Ekinox-U paired with SplitBox delivered an inertial navigation solution dedicated to the surveying market. Moreover, its integrated GNSS receiver simplified integration with multiple devices and SBG inertial sensors.
Today, the Navsight Marine solution replaces it, offering greater robustness with an aluminum IP68 enclosure. In addition, LED indicators display RTK, power, and recorder status. Finally, its smaller IMU installs closer to the MBES, while the Navsight box handles all computation and GNSS reception.
Navsight Ekinox Marine
Compact & cost-effective, Navsight Ekinox grade light and easy to set for portable sonar systems, making it ideal for Shallow Water applications.
Highly versatile, Navsight comes as a Motion Reference Unit (MRU), providing roll, pitch, and heave or as a full Navigation Solution with embedded tri-frequency receiver, or using an external GNSS receiver.

Ask a quotation for Navsight Ekinox Marine
Do you have questions?
Welcome to our FAQ section! Here, you will find answers to the most common questions about our showcased applications. Moreover, if you do not find the information you need, please contact us directly for assistance.
What are wave measurement sensors?
Wave measurement sensors are essential tools for understanding ocean dynamics and improving safety and efficiency in marine operations. By providing accurate and timely data on wave conditions, they help inform decisions across various sectors, from shipping and navigation to environmental conservation. Wave buoys are floating devices equipped with sensors to measure wave parameters such as height, period, and direction.
They typically use accelerometers or gyroscopes to detect wave motion (e.g. wave period) and can transmit real-time data to shore-based facilities for analysis.
What is bathymetry?
Bathymetry is the study and measurement of the depth and shape of underwater terrain, primarily focused on mapping the seafloor and other submerged landscapes. It is the underwater equivalent of topography, providing detailed insights into the underwater features of oceans, seas, lakes, and rivers. Bathymetry plays a crucial role in various applications, including navigation, marine construction, resource exploration, and environmental studies.
Modern bathymetric techniques rely on sonar systems, such as single-beam and multibeam echo sounders, which use sound waves to measure water depth. These devices send sound pulses toward the seafloor and record the time it takes for the echoes to return, calculating depth based on the speed of sound in water. Multibeam echo sounders, in particular, allow for wide swaths of the seafloor to be mapped at once, providing highly detailed and accurate seafloor representations. Frequently, a RTK + INS solution is associated to create accurately positioned 3D bathymetric representations of the seafloor.
Bathymetric data is essential for creating nautical charts, which help guide vessels safely by identifying potential underwater hazards like submerged rocks, wrecks, and sandbanks. It also plays a vital role in scientific research, helping researchers understand underwater geological features, ocean currents, and marine ecosystems.
What is a buoy used for?
A buoy is a floating device primarily used in maritime and water-based environments for several key purposes. Buoys are often placed in specific locations to mark safe passages, channels, or hazardous areas in bodies of water. They guide ships and vessels, helping them avoid dangerous spots like rocks, shallow waters, or wrecks.
They are used as anchoring points for vessels. Mooring buoys allow boats to tie up without having to drop anchor, which can be especially useful in areas where anchoring is impractical or damaging to the environment.
Instrumented buoys are equipped with sensors to measure environmental conditions like temperature, wave height, wind speed, and atmospheric pressure. These buoys provide valuable data for weather forecasting, climate research, and oceanographic studies.
Some buoys act as platforms for collecting and transmitting real-time data from the water or seabed, often used in scientific research, environmental monitoring, and military applications.
In commercial fishing, buoys mark the location of traps or nets. They also help in aquaculture, marking the locations of underwater farms.
Buoys can also mark designated areas such as no-anchoring zones, no-fishing zones, or swimming areas, helping enforce regulations on the water.
In all cases, buoys are critical for ensuring safety, facilitating marine activities, and supporting scientific research.
What is buoyancy?
Buoyancy is the force exerted by a fluid (such as water or air) that opposes the weight of an object submerged in it. It allows objects to float or rise to the surface if their density is less than that of the fluid. Buoyancy occurs because of the difference in pressure exerted on the object’s submerged portions—greater pressure is applied at lower depths, creating an upward force.
The principle of buoyancy is described by Archimedes’ principle, which states that the upward buoyant force on an object is equal to the weight of the fluid displaced by the object. If the buoyant force is greater than the object’s weight, it will float; if it is less, the object will sink. Buoyancy is essential in many fields, from marine engineering (designing ships and submarines) to the functionality of floating devices like buoys.
