Essential technologies in UAV navigation
Several technologies are integral to the effective navigation of UAVs. Understanding these technologies is essential for comprehending how UAV navigation vehicles operate and excel in their missions.
Inertial Navigation Systems (INS) are pivotal for UAV unmanned navigation. They provide Roll, Pitch and Heading information which are fused with GNSS (including systems like GPS, GLONASS, and Galileo) data for real-time robust navigation and critical positioning data for UAVs even in challenging conditions, near buildings or power lines for example. Our INS utilizes a combination of accelerometers and gyroscopes to calculate the UAV’s position, orientation, and velocity based on its movements. By continuously measuring acceleration and angular velocity, INS can maintain accurate navigation even in challenging conditions.
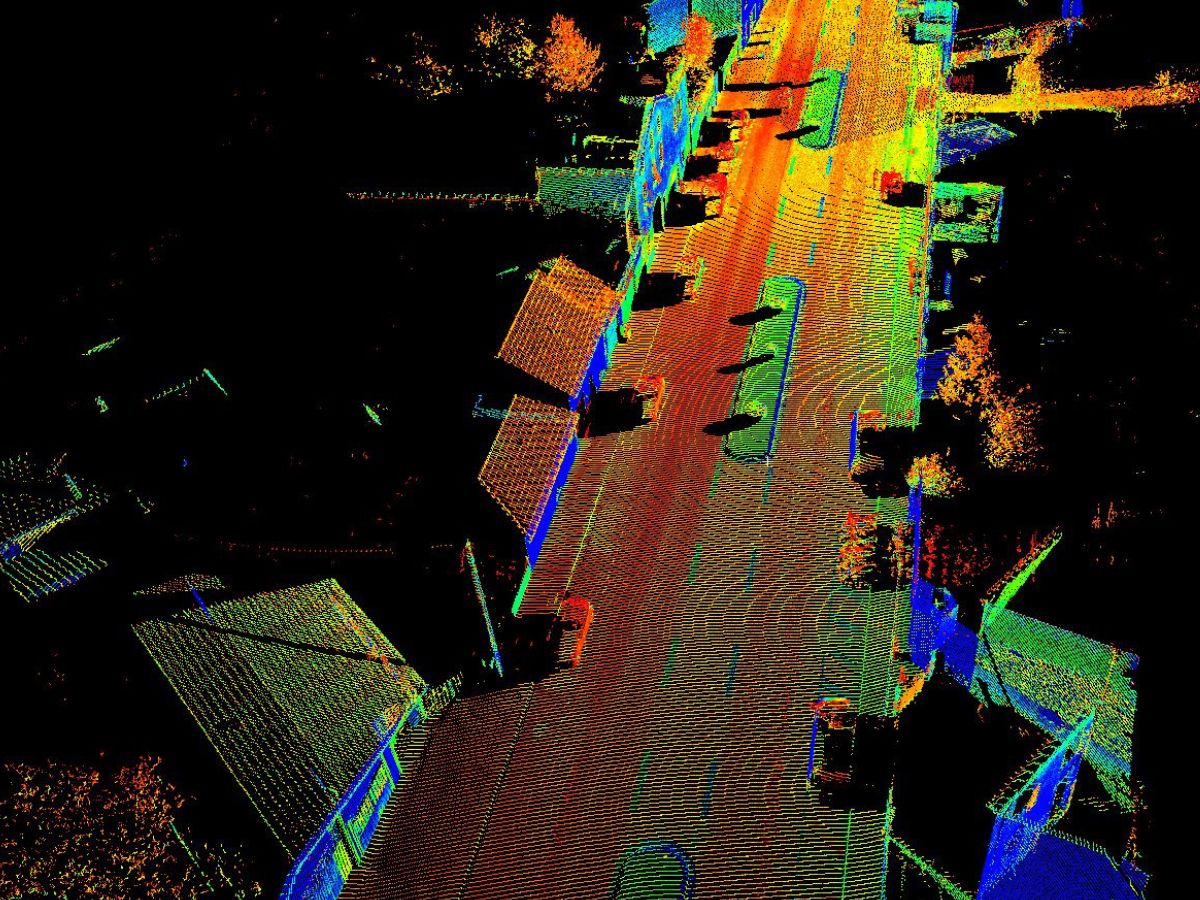
By utilizing cameras and other sensors, UAVs can perceive their surroundings and make informed navigation decisions. Sensor fusion combines data from multiple sources, such as INS, GNSS, and cameras, to enhance accuracy and reliability. This technology allows drones to recognize obstacles, identify landing zones, and navigate autonomously in complex environments.

Real-Time Kinematic (RTK) positioning for UAV navigation
RTK positioning enhances GNSS accuracy by using a network of base stations that provide correction data to the UAV. This technology enables centimeter-level positioning, making it particularly valuable in applications such as surveying, mapping, and precision agriculture.
RTK-equipped UAVs can perform highly accurate tasks, improving the quality of data collected and the effectiveness of operations.
We provide state-of-the-art motion and navigation solutions tailored for UAV -unmanned aerial vehicles. Our advanced inertial sensors and navigation systems deliver precise positioning and reliable performance in various operating conditions.
Whether you require high-accuracy INS for complex aerial tasks or robust GNSS integration for enhanced positioning, our products ensure your UAVs operate at optimal efficiency. With continuous monitoring and real-time data processing, our solutions empower UAVs to navigate autonomously while maintaining safety and reliability.
Navigation sensors that impact your UAVs performance
Choosing the right motion, navigation and control sensors impact directly UAV’s performance. This sensors vary widely in their specifications based on their intended application and operational environment.
Our MEMS based sensors are compact and lightweight witch make them ideal for UAV applications to minimize the overall weight of the vehicle. With low power consumption, they extend the UAV’s flight duration consuming less than 1 watt.
These navigation sensors provide data at rates ranging up to 200 Hz, enabling real-time adjustments to the UAV’s flight path and behavior.
Explore our solutions and find the right one that fit your needs.
Solutions for industrial UAVs
Our solutions integrate seamlessly with UAV platforms, to deliver reliable performance in even the most challenging conditions.

Pulse-40

Quanta Micro

Ekinox Micro

OEM Ellipse-D

OEM Ellipse-N
Industrial applications brochure
Get our brochure delivered straight to your inbox!
Case Studies
Discover the impactful success stories showcasing SBG Systems’ UAV inertial solutions. Uncover how our state-of-the-art navigation systems have revolutionized UAV operations across multiple sectors. Each case study presents real-world scenarios where our advanced inertial sensors and GNSS technology have achieved unparalleled accuracy, reliability, and performance.
Gain valuable insights and practical examples that illustrate how our solutions effectively address complex challenges and enhance operational excellence. Explore our case studies to see how SBG Systems’ UAV inertial solutions can elevate your projects and deliver exceptional results.



They talk about us
Hear first hand, from the innovators and clients who have adopted our technology.
Their testimonials and success stories illustrate the significant impact our sensors have in practical UAV navigation applications.
Discover other ways to use inertial systems in industry operations
Inertial systems play a vital role in enhancing efficiency, precision, and safety across a wide range of industrial operations. From equipment automation and mobile robotics to heavy machinery monitoring, these technologies enable reliable positioning, orientation, and motion data—even in challenging or GNSS-challenge environments. Discover how inertial solutions are driving innovation across diverse industrial applications.
Do you have questions?
Welcome to our FAQ section! Here, you’ll find answers to the most frequent questions about the applications we highlight. If you don’t find what you’re looking for, feel free to contact us directly!
Do UAVs use GPS?
Unmanned Aerial Vehicles (UAVs), commonly known as drones, typically use Global Positioning System (GPS) technology for navigation and positioning.
GPS is an essential component of a UAV’s navigation system, providing real-time location data that enables the drone to determine its position accurately and execute various tasks.
In recently years, this term has been replaced by a new term GNSS (Global Navigation Satellite System). GNSS refers to the general category of satellite navigation systems, which encompasses GPS and various other systems. In contrast, GPS is a specific type of GNSS developed by the United States.
What is UAV geofencing?
UAV geofencing is a virtual barrier that defines specific geographic boundaries within which an unmanned aerial vehicle (UAV) can operate.
This technology plays a critical role in enhancing the safety, security, and compliance of drone operations, particularly in areas where flight activities may pose risks to people, property, or restricted airspace.
In industries like delivery services, construction, and agriculture, geofencing helps ensure that drones operate within safe and legal areas, avoiding potential conflicts and enhancing operational efficiency.
Law enforcement and emergency services can use geofencing to manage UAV operations during public events or emergencies, ensuring drones do not enter sensitive areas.
Geofencing can be employed to protect wildlife and natural resources by restricting drone access to certain habitats or conservation areas.