
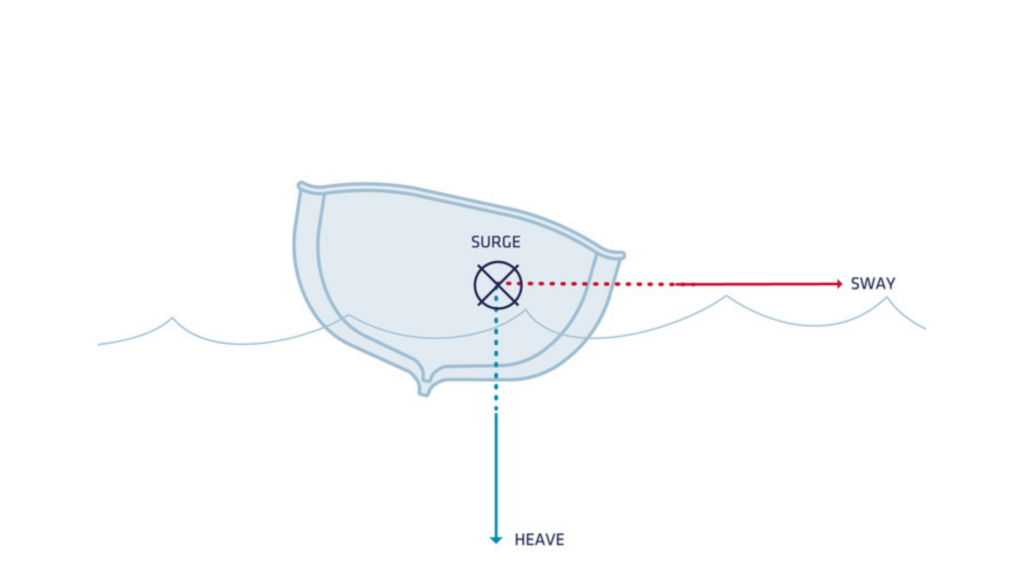
Heave is a motion measurement very specific to marine applications. It refers to the up-and-down motion of a vessel due to wave action, measured as linear displacement along the local vertical axis, assuming a mean value of zero at the vessel’s center of gravity.
Major upgrades have been applied to our real-time and delayed heave algorithms.
For more details on our heave algorithm and how to set it up correctly, please visit the our Support Centre Knowledge Base page.
Recent Developments
Our current real-time and delayed heave algorithms are already industry-leading and have the best specifications. However, we have made significant improvements to further improve their accuracy. The latest advancements, introduced in firmware version 5.1, use the distance from the Center of Rotation (COR) to the IMU (Inertial Measurement Unit), resulting in the following benefits for both real-time and delayed heave algorithms:
- Enhanced performance:
- Real-time heave accuracy improved from 5 cm to 4 cm.
- Delayed heave accuracy improved from 2.5 cm to 2 cm.
- Flexible IMU installation: the IMU can now be installed anywhere on the ship, as long as the distance to the COR is provided. This is a significant improvement over previous versions, which required the IMU to be located near the vessel’s COR—a challenge for larger vessels.
- Improved operation in challenging Sea states: full performance is maintained even in more demanding sea conditions.
Qualification of New Algorithms
Qualifying heave performance is inherently challenging, especially when aiming for high accuracy. Here’s how we addressed this:
Evaluation Process
We conducted multiple evaluations, including comparisons of bathymetric datasets derived from repeated passes over the same seafloor area. These evaluations were facilitated by our customer and partner, Norbit.
- Bathymetric evaluations: by comparing several survey lines over the same area, we established an upper bound on heave performance. This method accounts for the entire acquisition chain’s errors, including those from the INS position and angular measurements, multibeam sonar, and other sources.
- Post-Processing verification: we also tested our new delayed heave algorithm using Qinertia post-processed GNSS data. The results showed that the new algorithm performs comparably to RTK.
Results and Conclusion
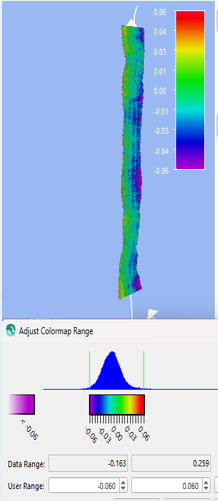
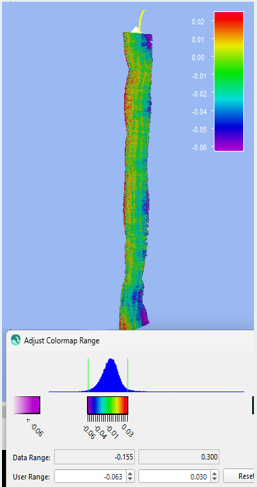
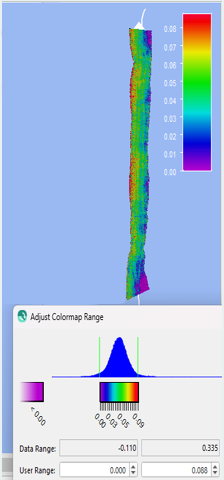
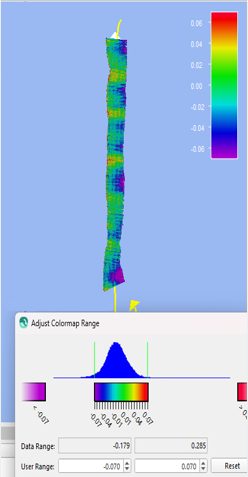
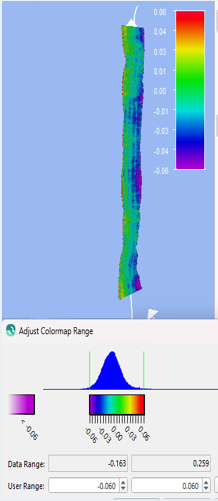
The following screenshots provide a side-by-side comparison of the old and new algorithm versions. Note that while the color scales differ, the provided statistics clearly show improvement. It’s worth mentioning that despite visual artifacts in the old heave algorithm, which were due to unusual sea states and large vessel setup, the values remained within specifications.
Comparison of the old and new algorithm versions
These evaluations confirm the significant improvement in performance of our new heave algorithms, providing superior accuracy and reliability in various conditions.
Improvement in both real-time and delayed heave measurements
The performance enhancements are summarized in the table below, showing a clear improvement in both real-time and delayed heave measurements.
| Old real-time heave | New real-time heave | Old delayed heave | New delayed heave | PPK reference | |
|---|---|---|---|---|---|
| Mean | 4 cm | 3 cm | 4 cm | 1 cm | 1 cm |
| Standard deviation | 4 cm | 2 cm | 2 cm | 2 cm | 2 cm |
These enhancements ensure that with our high-performance product line:
- Real-time heave applications achieve a 4 cm accuracy.
- Surveying applications, compatible with delayed heave and supported by major hydrography software packages, achieve a 2 cm accuracy.
Additionally, the heave-enhanced altitude function available on marine units will benefit from these improvements. All these enhancements are available in our Qinertia 4 post-processing software and our high-performance products starting with firmware version 5.1. These improvements will soon extend to our Ellipse product range.