Glossary
Attitude in navigation
In navigation, attitude refers to the orientation of a vehicle or object relative to a fixed frame of reference, which is typically defined by three rotational axes: pitch, roll, and yaw.
Go to full definition →AHRS – Attitude and Heading Reference System
Attitude & Heading Reference System (AHRS) is a crucial technology in modern aviation and maritime navigation. It provides essential information about an aircraft or vessel’s orientation and heading, ensuring safe and accurate navigation.
Go to full definition →IMU – Inertial Measurement Unit
Inertial Measurement Units (IMU) are fundamental components in modern navigation and motion tracking systems. An Inertial Measurement Unit (IMU) is an electronic device that measures and reports a body's specific force, angular rate, and sometimes the magnetic field surrounding the body, using a combination of accelerometers, gyroscopes, and sometimes magnetometers. IMUs are critical for tracking and controlling the position and orientation of various objects, from aircraft and ships to smartphones and gaming controllers. There are different types of IMU sensors: the one based on FOG (Fiber Optic Gyroscope), the RLG IMUs (Ring Laser Gyroscope), and lastly, IMU based on MEMS technology (Micro Electro-Mechanical Systems). This technology allows lower costs and low power requirements while ensuring performance. MEMS-based systems therefore combine high performance and ultra-low power in a smaller unit.
Go to full definition →INS – Inertial Navigation System
Inertial Navigation System (INS), also called INS, is a navigation device that provides roll, pitch, heading, position, and velocity. This sophisticated technology determines an object’s position, orientation, and velocity without relying on external references. This self-contained navigation solution is crucial in various applications, ranging from aerospace and defense to robotics and autonomous vehicles.
Go to full definition →RTK – Real Time Kinematic
RTK, or Real Time Kinematics, is a sophisticated positioning technology used to achieve high-precision GNSS location data in real-time.
Go to full definition →RTCM – Radio Technical Commission for Maritime Services
RTCM (Radio Technical Commission for Maritime Services) is an international organization that develops standards to improve communication, navigation, and related systems for maritime safety and efficiency.
Go to full definition →Georeferencing
Georeferencing is the process of aligning spatial data, such as maps, aerial imagery, or scanned documents, to a specific coordinate system so that it accurately corresponds to real-world locations.
Go to full definition →Reference station
A reference station is a fixed, high-precision location equipped with a GNSS receiver and antenna that collects positioning data to improve location data accuracy
Go to full definition →Dead reckoning navigation
Dead reckoning is a navigation technique used to determine one's current position by using a previously known position and calculating the course based on speed, time, and direction traveled.
Go to full definition →ITAR – International Traffic in Arms Regulations
The International Traffic in Arms Regulations (ITAR) are a set of U.S. government regulations that control the export and import of defense articles and services, including both physical items and technical data related to military use.
Go to full definition →Multisensor fusion
Multisensor fusion is a critical component in the environmental perception systems of driverless vehicles, enhancing safety and decision-making capabilities. By integrating data from various sensors such as cameras, LiDAR, radar, and ultrasonic devices, these systems can achieve a more comprehensive and accurate global positioning accuracy and overall system performance in different scenarios. What are the […]
Go to full definition →Magnetic field
A magnetic field is a physical field that represents the magnetic influence on electric currents, moving charges, and magnetic materials. The Earth behaves like a giant magnet and it generates its own magnetic field that goes from South to North pole. Poles are not exactly aligned with the geographic North-South axis.
Go to full definition →Vibrations
Vibrations can introduce unwanted noise or distortions into the measurements because MEMS sensors are highly sensitive to external forces.
Go to full definition →PPK – Post Processing Kinematic
Post-Processing Kinematic is a GNSS data processing method used to achieve high-accuracy positioning by correcting errors in the raw positioning data. It is widely used in applications where precise geospatial information is critical, such as surveying, mapping, and UAV operations.
Go to full definition →Motion compensation and position
Motion compensation and position refers to the ability of a system, typically involving sensors or devices, to adjust or compensate for movement or motion in order to maintain accurate positional information.
Go to full definition →ROS drivers
The Robot Operating System (ROS) is a set of software libraries and tools that help you build robot applications. From drivers to state-of-the-art algorithms, and with powerful developer tools, ROS has what you need for your next robotics project. And it’s all open source.
Go to full definition →Heading method
Heading refers to the direction in which a vehicle or vessel is pointed relative to a reference direction, typically true north or magnetic north.
Go to full definition →VBS – Virtual Base Station
A Virtual Base Station (VBS) is a GNSS processing technique designed to enhance positioning accuracy in real-time kinematic (RTK) and post-processing applications. Instead of relying on a single, fixed physical base station, a VBS generates a virtual reference station near the rover’s location. This approach reduces positioning errors caused by atmospheric disturbances and improves overall system precision.
Go to full definition →VRS – Virtual Reference Station
A Virtual Reference Station (VRS) is a simulated GNSS reference point designed to enhance real-time positioning accuracy. By leveraging data from a network of continuously operating reference stations (CORS), VRS creates a localized correction signal, reducing spatial errors and improving RTK (Real-Time Kinematic) precision. This allows users to achieve centimeter-level accuracy as if a reference station were positioned at their exact location.
Go to full definition →Fugro Marinestar
Fugro Marinestar ® delivers high-precision GNSS positioning services tailored to the unique demands of industries such as marine construction, dredging, hydrography, naval operations, wind farm development, and oceanographic research. With over 30 years of expertise in satellite-based positioning and continuous technological advancements, Marinestar® provides cutting-edge, dependable solutions designed for critical marine applications. Multiple GNSS constellations […]
Go to full definition →PRN Code (Pseudo-Random Noise Code)
A Pseudo-Random Noise (PRN) code generates a binary sequence that appears random but remains deterministic and repeatable. Satellite navigation systems, such as GPS, Galileo, and BeiDou, along with various communication applications, rely on these codes. PRN codes offer key characteristics that make them essential for navigation and communication. They follow a deterministic pattern since algorithms […]
Go to full definition →PointPerfect ™
What is PointPerfect ™? PointPerfect is a PPP-RTK GNSS correction service provided by u-blox. It combines the high accuracy of RTK with the flexibility of PPP, addressing the limitations of each technology. While RTK offers high accuracy without convergence time, it requires a nearby base station. On the other hand, PPP eliminates the need for […]
Go to full definition →NAVIC – Navigation with Indian Constellation
NAVIC (Navigation with Indian Constellation) is an autonomous satellite navigation system developed by the Indian Space Research Organisation (ISRO) to provide accurate and reliable position data services to users in India and the surrounding region.
Go to full definition →Gyrocompass
A gyrocompass is a highly specialized device used for determining direction with remarkable accuracy. Unlike magnetic compasses, which rely on the Earth's magnetic field, a gyrocompass uses the principles of gyroscopic motion to find true north.
Go to full definition →Reference Frames
A reference frame is a coordinate system used to measure positions, velocities, and accelerations of objects. It provides a fixed or moving point of reference, allowing engineers and scientists to describe motion consistently. Different applications use different reference frames depending on the required perspective.
Go to full definition →NED (North-East-Down) Frame
The NED (North-East-Down) coordinate frame serves as a widely used reference system for navigation and inertial measurements.
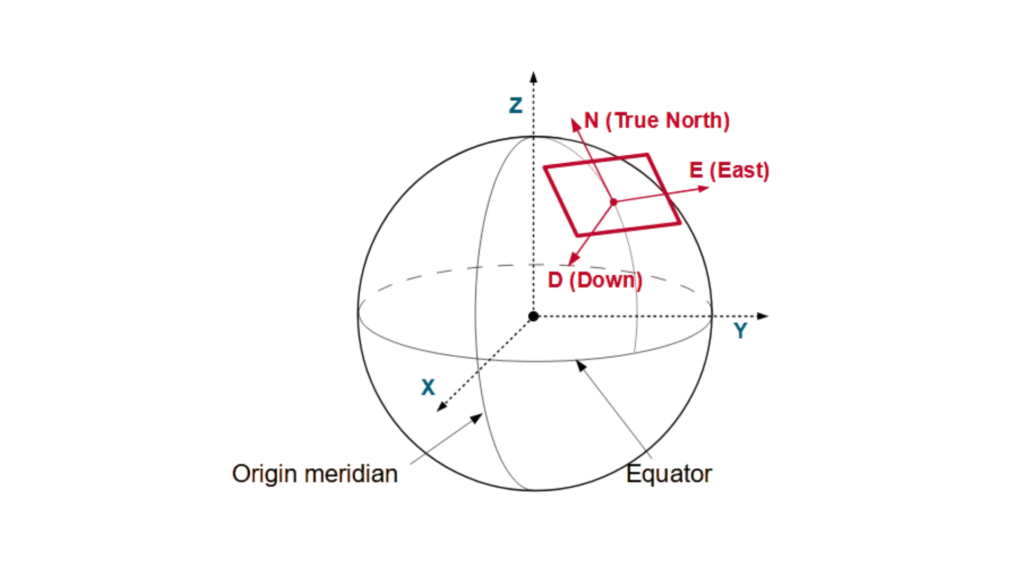
The North-East-Down (NED) frame serves as a local reference frame, defined by its ECEF coordinates. Typically, it remains fixed to the vehicle or platform and moves with the body frame. This frame positions the North and East axes in a plane tangent to Earth’s surface at its current location, based on the WGS84 ellipsoid model.
It consists of three orthogonal axes: the North axis points to True North, the Down axis extends toward Earth’s interior (opposite to the local Up direction), and the East axis completes the right-handed system by pointing east (perpendicular to North).
Similarly, a vehicle or platform can have the East-North-Up (ENU) frame locally attached, moving with the system. Unlike the NED frame, the ENU frame orients its axes differently: the North axis still points to True North, but the Up axis extends away from Earth’s interior, while the East axis maintains its right-handed system alignment by pointing east.
This right-handed coordinate system simplifies calculations for aircraft, marine vessels, and autonomous vehicles by aligning with natural movement directions.
NED applications use
A drone relies on an autopilot system to calculate its trajectory within the NED coordinate framework. When the drone is in a northward flight, its position increases in the North direction. Conversely, when the drone ascends, its Down coordinate value decreases, given that Down is positive downward.
Conversely, a ship’s INS (Inertial Navigation System) functions by tracking its movement relative to the NED frame. As the vessel moves eastward, its East coordinate increases. Conversely, when the vessel dives, its Down coordinate rises.
A self-driving car utilises the NED frame to ascertain its position. The vehicle’s North coordinate increases as it moves northward, while bumps or dips in the terrain cause changes in the Down value.
Precision-guided munitions rely on the NED frame to adjust their trajectory. As a missile descends toward its target, the Down coordinate increases, ensuring accurate targeting.
AUVs (Autonomous Underwater Vehicles) utilise the NED frame to navigate. When an AUV moves in a northeast direction, both the North and East coordinates increase, while changes in depth affect the Down coordinate.
The NED system has been developed to align movements with the Earth’s natural orientation, thereby simplifying navigation. This system is utilized by engineers, pilots and scientists to enhance precision in positioning, guidance and control applications.
ECEF: Earth-Centered, Earth-Fixed Frame
The Earth-Centered, Earth-Fixed (ECEF) frame is a global coordinate system used to represent positions on or near Earth. It is a rotating reference frame that remains fixed relative to Earth’s surface, meaning it moves with the planet as it rotates. Engineers, scientists, and navigation systems use ECEF coordinates to track positions accurately in a global context.
ECEF Coordinate System
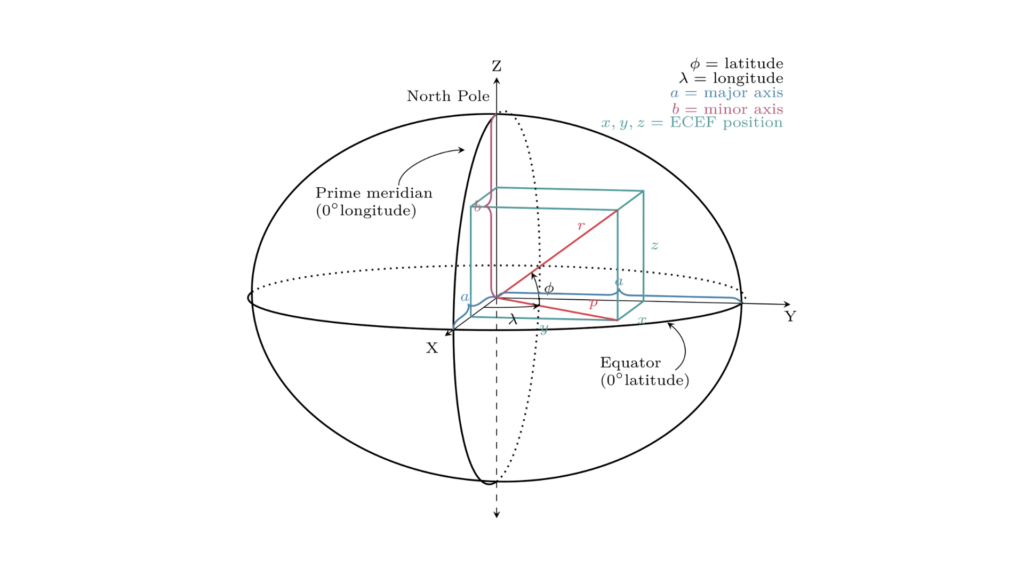
An Earth-centered Earth-fixed (ECEF) system represents position relative to the center of the reference ellipsoid using Cartesian coordinates (X, Y, Z). The reference ellipsoid determines the distance between its center and the Earth’s center.
ECEF defines locations using these three axes centered at Earth’s core:
1 – The positive X-axis intersects the ellipsoid’s surface at 0° latitude and 0° longitude, where the equator meets the prime meridian.
2 – The positive Y-axis intersects the ellipsoid’s surface at 0° latitude and 90° longitude.
3 – The positive Z-axis intersects the ellipsoid’s surface at 90° latitude and 0° longitude, the North Pole.
Examples of ECEF Applications
Firstly, GPS satellites broadcast signals in ECEF coordinates. Next, a smartphone receives signals from multiple satellites and calculates its position in the Earth-Centered, Earth-Fixed Frame before converting it to latitude, longitude, and altitude.
Similarly, flight management systems use ECEF coordinates to determine an aircraft’s position. As a result, they enable accurate global tracking, even over oceans or remote regions.
Meanwhile, satellites orbit Earth in an inertial frame but use the ECEF frame to communicate their positions. Consequently, ground stations track them in this reference system to ensure precise orbital adjustments.
Likewise, surveyors rely on ECEF coordinates to map large-scale infrastructure projects. By doing so, they reference a stable Earth-centered system and minimize measurement errors across continents.
Finally, engineers use ECEF coordinates to plan missile and rocket launches, ensuring precise targeting and orbital insertion. This way, they accurately calculate how Earth’s rotation affects a vehicle’s path. This version maintains clarity while improving flow and engagement. Let me know if you’d like any tweaks!
ECEF simplifies global positioning by aligning with Earth’s surface, making it essential for GPS, aerospace, and geodetic applications
Tell us about your projectBody Frame
The sensor (body) coordinate frame, often called the body frame or vehicle frame, serves as a reference frame fixed to a moving platform, such as a drone, car, missile, or underwater vehicle. Engineers use this frame to describe the motion and orientation of the platform relative to itself, making it essential for navigation, control, and sensor fusion.
Go to full definition →Inertial reference frame
An inertial reference frame is a coordinate system in which objects follow Newton’s laws of motion without the need to account for fictitious or external forces. In other words, it is a non-accelerating frame—either at rest or moving at constant velocity—where a body remains at rest or continues in uniform motion unless acted upon by an external force. Scientists and engineers rely on inertial frames to analyze motion accurately in space, aviation, marine, and robotics systems.
Go to full definition →Point Cloud
Point cloud refers to a collection of 3D points that represent the shape and structure of an environment. These points are typically generated by LiDAR or 3D scanning systems, and each point contains spatial coordinates (X, Y, Z), sometimes along with additional attributes like intensity or color. While the LiDAR sensor captures the raw spatial data, it is the inertial navigation system (INS) that provides the precise position and orientation of the sensor at every moment.
Go to full definition →LiDAR – Light Detection and Ranging
LiDAR stands for Light Detection and Ranging. It is a method of measuring distances by emitting laser beams towards a target and measuring the time it takes for the beams to return to the sensor. The data collected from these measurements can then be used to generate accurate, high-resolution 3D models and maps of the environment.
Go to full definition →Multipath Error
In inertial navigation, multipath error occurs when GNSS signals reflect off surfaces such as buildings, water, or terrain before reaching the receiver, causing signal distortion.
Go to full definition →Multipath rejection
Multipath rejection refers to a receiver or antenna system’s ability to reduce errors caused by reflected GNSS signals. When a GNSS signal travels directly from a satellite to a receiver, it provides accurate positioning data. However, nearby surfaces—such as buildings, water bodies, or metal structures—can reflect the signal, causing it to arrive at the receiver slightly later than the direct signal.
Go to full definition →Satellite positioning systems
Satellite positioning systems help determine a precise location anywhere on Earth using satellite signals. These systems work globally. All satellites orbit the Earth and continuously transmit signals to receivers on the ground. These signals contain time and location data.
Go to full definition →GPS – Global Positioning System
Global Positioning System or GPS is a satellite-based navigation system that provides location and time information anywhere on Earth. Initially developed by the U.S. Department of Defense for military navigation, GPS has become a crucial technology for a wide range of civilian applications, including navigation, mapping, and time synchronization.
Go to full definition →BeiDou
Beidou is the chinese global positioning system, offering global positioning, navigation, and timing services. Named after the Big Dipper constellation, Beidou represents China's significant advancement in space infrastructure and technology.
Go to full definition →GNSS – Global Navigation Satellite System
GNSS (Global Navigation Satellite System) refers to a network of satellites that work together to provide accurate positioning, navigation, and timing information globally. GNSS includes several different systems, such as GPS, GLONASS, Galileo, and Beidou, each contributing to the overarching goal of delivering precise spatial data to users across the world.
Go to full definition →EKF – Extended Kalman filter
The Extended Kalman Filter (EKF) is an algorithm used for estimating the state of a dynamic system from noisy measurements. It extends the Kalman Filter to accommodate non-linear systems, which are common in real-world navigation scenarios. While the standard Kalman Filter assumes linearity and Gaussian noise, the EKF linearizes the non-linear system around the current estimate, enabling it to work effectively in more complex environments.
Go to full definition →MRU – Motion Reference Unit
A Motion Reference Unit (MRU) has been developed for the purpose of accurately tracking and reporting the movements of objects in dynamic environments such as the marine and aerospace sectors. The system is designed to measure roll, pitch, and heave motions, thereby facilitating enhanced navigation, stabilisation, and system performance in real time.
Go to full definition →Galileo: satellite navigation systems
Galileo is Europe’s global satellite navigation system. It delivers accurate positioning and timing services worldwide. The European Union and ESA developed and operate Galileo. They created it to offer independent and reliable navigation support. Galileo complements systems like GPS, GLONASS, and Beidou.
Go to full definition →GLONASS: Russian global positioning system
GLONASS is a global navigation satellite system operated by Russia. It is designed to provide accurate positioning, navigation, and timing services worldwide. Similar to other global navigation systems like GPS, Galileo, and Beidou, GLONASS uses a network of satellites to deliver precise location data to users on the ground.
Go to full definition →GNSS constellations
Satellite Constellation refers to a group of satellites working together to achieve a common objective, such as providing global coverage or enhancing communication and navigation services. These constellations are strategically designed to ensure continuous and reliable service by ensuring that satellites work in coordination, often in specific orbital patterns.
Go to full definition →Gyroscope
A gyroscope in navigation is a device that measures angular velocity or rotational movement around a specific axis. By detecting changes in orientation, gyroscopes help maintain and control the stability and direction of vehicles, aircraft, and spacecraft. They are essential for systems that require precise control of movement and orientation, such as autopilot systems, inertial navigation systems (INS), and stabilization systems.
Go to full definition →RTS: Rauch–Tung–Striebel
RTS: Rauch–Tung–Striebel requires only two steps: forward filtering and backward smoothing. It stores data efficiently and is easy to program. However, estimating the ambiguity parameter in the state vector makes improving navigation accuracy during initialization and reconvergence difficult.
Go to full definition →DVL – Doppler Velocity Log
A Doppler Velocity Log (DVL) is an acoustic sensor used to measure the velocity of an underwater vehicle relative to the seafloor or water column. It operates using the Doppler effect, where sound waves emitted from the DVL's transducers reflect off surfaces and return with a frequency shift proportional to the vehicle's motion. By analyzing this shift, the DVL calculates the velocity in three dimensions (surge, sway, and heave), enabling accurate underwater navigation and positioning.
Go to full definition →Spoofing
What is spoofing ? Spoofing is a sophisticated type of interference that deceives a GNSS receiver into calculating a false position. During such an attack, a nearby radio transmitter broadcasts counterfeit GPS signals that override the authentic satellite data received by the target.
Go to full definition →Spoofing mitigation
What is spoofing mitigation ? Spoofing Mitigation involves implementing methods and technologies to detect, prevent, and respond to spoofing attacks on GNSS systems. Spoofing attacks can deceive GNSS receivers by broadcasting fraudulent signals that appear to be from legitimate satellites. These attacks can lead to serious consequences, including navigational errors, loss of service, and security breaches.
Go to full definition →Jamming
Jamming is the act of deliberately interfering with radio signals to disrupt the normal operation of communication or navigation systems. Often illegal, this activity poses serious risks by blocking or overpowering essential signals, especially those used in GPS and other critical networks. As our world grows more dependent on wireless technology, understanding and addressing the threat of jamming has become increasingly important.
Go to full definition →Anti-jamming
Anti-jamming refers to techniques and technologies designed to protect satellite signals, especially GNSS signals, from intentional or unintentional interference. Because these signals are weak by the time they reach receivers, they are vulnerable to disruption from jamming devices that block or overwhelm the signal. Anti-jamming systems detect, filter, or avoid these interfering signals to ensure continuous, accurate navigation and communication. These methods include using directional antennas, advanced signal processing, frequency diversity, and integration with other sensors, helping maintain reliable performance even in challenging or hostile environments. An anti-jamming system protects GPS and satellite signals from low-power jammers, which are easily accessible online and can disrupt positioning and timing over wide areas.
Go to full definition →Jammer
Jammers pose a growing and significant threat to satellite-based navigation systems across the globe. As society increasingly relies on Global Navigation Satellite Systems (GNSS) such as GPS, Galileo, GLONASS, and BeiDou for precise positioning, timing, and guidance, the risks associated with signal disruption have become more serious.
Go to full definition →Meaconing
Meaconing is the rebroadcasting of GNSS signals to mislead navigation systems, causing receivers to calculate false positions or timings. This for of GNSS attack is a subtype of Spoofing, that involves intercepting GNSS signals and rebroadcasting them without altering the content but just with a delay.
Go to full definition →VRU – Vertical Reference Unit
A Vertical Reference Unit (VRU) includes an inertial measurement unit (IMU) and filtering algorithms to deliver accurate Roll and Pitch angles. It uses gravity as a vertical reference to stabilize the IMU. The system combines gyroscope data with gravity measurements from accelerometers using a Kalman filter to compute Roll and Pitch. VRUs benefit from gyroscopes to maintain accurate Roll and Pitch during low to medium dynamic movements. They are simple to install and operate. However, their precision may decrease in highly dynamic conditions because they cannot fully separate linear accelerations from gravity-based measurements. A Motion Reference Unit (MRU) builds on the VRU by also providing ship motion data—Heave, Surge, and Sway—alongside Roll and Pitch, making it ideal for demanding marine applications.
Go to full definition →GNSS antennas
GPS antennas and GNSS antennas play a crucial role in satellite navigation systems by capturing signals from satellites orbiting the Earth. These antennas serve as the primary gateway for receiving positioning, navigation, and timing data essential for applications ranging from everyday smartphone navigation to high-precision surveying and autonomous vehicle guidance. While GPS antennas focus specifically on the Global Positioning System, GNSS antennas support multiple satellite constellations like GPS, Galileo, GLONASS, and BeiDou, offering enhanced accuracy and reliability. Understanding how these antennas work and their key features helps users select the right solution for their specific navigation needs.
Go to full definition →MBES – Multibeam Echosounder
A Multibeam Echo Sounder (MBES) is a high-resolution sonar system used to map the seafloor and underwater features with exceptional precision. By emitting multiple sound beams in a wide fan shape beneath a vessel, MBES measures the time it takes for each beam to reflect off the seabed and return. This data allows it to generate detailed, three-dimensional images of underwater terrain. Widely used in hydrographic surveying, marine research, offshore engineering, and environmental monitoring, MBES provides accurate depth information essential for safe navigation, scientific analysis, and the development of maritime infrastructure.
Go to full definition →SLAM – Simultaneous localization and mapping
Simultaneous Localization and Mapping (SLAM) is a core technology that enables autonomous systems to understand and navigate unknown environments. By using onboard sensors such as cameras, lidar, or IMUs, SLAM allows a device to build a map of its surroundings while determining its precise location within that map—all in real time. This powerful technique plays a critical role in applications ranging from robotics and drones to self-driving cars and augmented reality. SLAM eliminates the need for external positioning systems like GNSS, making it especially valuable in indoor, underground, or otherwise GNSS-denied environments.
Go to full definition →Subsea navigation system
Subsea navigation systems provide accurate positioning and motion tracking for underwater vehicles operating in GNSS-denied environments. These systems are essential for tasks such as seabed mapping, pipeline inspection, offshore construction, and marine research. By combining acoustic positioning, inertial sensors, Doppler velocity logs, and advanced sensor fusion algorithms, subsea navigation ensures reliable guidance in deep and complex underwater conditions. As underwater operations expand in scope and depth, robust navigation technology plays a critical role in enabling safe, efficient, and precise mission execution.
Go to full definition →SBAS – Satellite-based augmentation systems
Satellite-Based Augmentation Systems (SBAS) enhance GNSS positioning by providing real-time differential corrections without requiring a ground radio link. This makes SBAS an ideal solution for real-time surveys when radio communication is unavailable. By enabling the SBAS differential mode in your survey device settings, you can receive and record corrected positions directly via satellite. In regions where systems like WAAS (America), EGNOS (Europe), MSAS, or QZSS (Japan) are available, users can benefit from improved accuracy and reliability. When SBAS is active, the survey interface updates to reflect SBAS use, ensuring clear visibility of system status during data collection.
Go to full definition →Relative position
Relative position describes the location of one object in relation to another. Unlike absolute positioning, which uses fixed coordinates such as latitude and longitude, relative positioning relies on distance and direction between reference points. This concept plays a critical role in fields like robotics, navigation, surveying, and autonomous systems, where knowing how two or more objects move or interact with each other is more important than their exact global coordinates. By using sensors or communication links, systems can calculate precise spatial relationships, enabling accurate movements, formation control, or object tracking, even in environments where GNSS signals are weak or unavailable.
Go to full definition →FOG – Fiber optical gyroscope
An optical gyroscope, such as a fiber-optic gyroscope (FOG), measures rotation by using the interference of light rather than moving parts. It operates based on the Sagnac effect, detecting changes in orientation as light travels through long coils of optical fiber—sometimes several kilometers in length. This design offers high precision and reliability, making optical gyroscopes ideal for navigation systems in aerospace, marine, and defense applications.
Go to full definition →