Le système de référence d'attitude et de cap (AHRS) est une technologie essentielle dans l'aviation et la navigation maritime modernes. Il fournit des informations essentielles sur l'orientation et le cap d'un aéronef ou d'un navire, garantissant une navigation sûre et précise.
Il est également appelé Motion Reference Units (MRU).
Qu'est-ce qu'un système de référence d'attitude et de cap (AHRS) ?
Le système de référence d'attitude et de cap (AHRS) est un système intégré qui fournit des données d'orientation tridimensionnelles, notamment les angles de roulis, de tangage et de lacet, ainsi que des informations de cap. Ces données sont essentielles pour que les pilotes et les navigateurs conservent le contrôle et la connaissance de la situation. L'AHRS combine plusieurs capteurs pour fournir des informations d'orientation précises et fiables.
Composants de l'AHRS
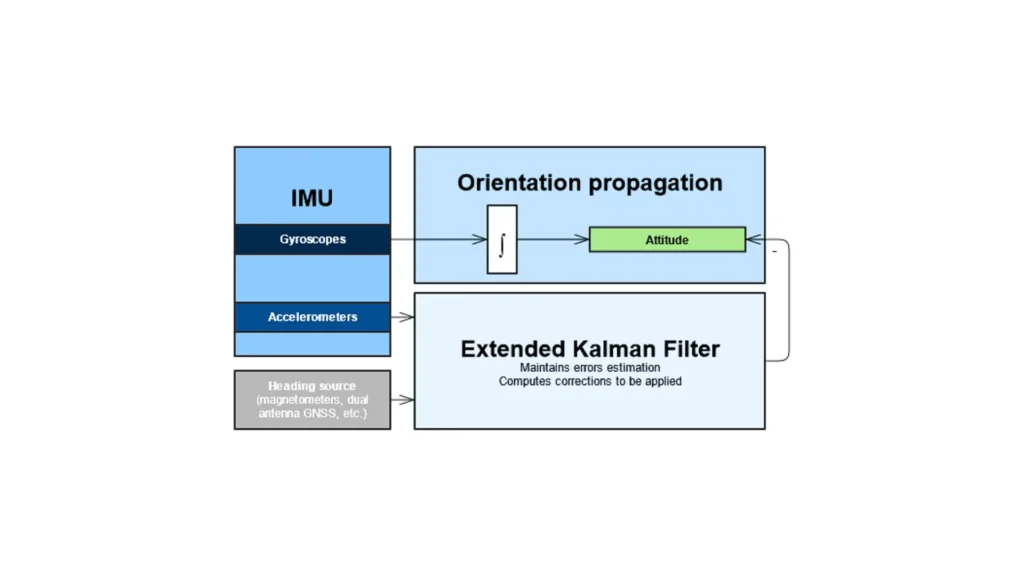
Un AHRS comprend généralement plusieurs composants clés :
- Gyroscopes : Mesurent la vitesse angulaire autour des trois axes principaux (roulis, tangage et lacet).
- Accéléromètres : Mesurent l’accélération linéaire, aidant à déterminer l’orientation par rapport à la gravité terrestre.
- Magnétomètres : Mesurent le champ magnétique terrestre pour fournir des informations de cap.
- Microprocesseurs : Traitent les données des capteurs pour calculer des informations précises sur l'orientation et le cap.
Importance d'un AHRS
L'AHRS est essentiel pour :
1 – Stabilité et contrôle : Assurer que l'aéronef ou le navire maintient l'orientation et le cap souhaités.
2 – Navigation : Fournir des données d'orientation précises pour une navigation précise.
3 – Sécurité : Améliorer la connaissance de la situation et réduire le risque de désorientation.
L'AHRS combine les données des gyroscopes, des accéléromètres et des magnétomètres pour fournir des informations complètes sur l'orientation et le cap. Le système utilise des algorithmes avancés pour traiter les données des capteurs et corriger les erreurs et la dérive.
Éventail d'applications
L'AHRS a un large éventail d'applications dans l'aviation, la navigation maritime et d'autres domaines nécessitant des informations précises sur l'orientation et le cap.
Dans l'aviation, l'AHRS est un élément essentiel des systèmes avioniques modernes. Il fournit aux pilotes des informations en temps réel sur l'orientation et le cap de l'appareil, ce qui permet une navigation sûre et précise. Les données, affichées sur l'écran principal de vol (PFD), améliorent la connaissance de la situation et réduisent la charge de travail du pilote. De plus, l'intégration de capteurs de mouvement avec les systèmes de pilote automatique permet un contrôle automatisé du vol et une amélioration de la stabilité.
De même, dans la navigation maritime, l'AHRS joue un rôle crucial en fournissant des informations d'orientation et de cap pour les navires et les bateaux. Il est particulièrement précieux dans des conditions de mer agitée, où des données d'orientation précises sont essentielles pour maintenir la stabilité et le contrôle. Dans ces applications, l'AHRS aide à la navigation, au traçage de la route et aux systèmes de pilotage automatique.
De plus, l'AHRS est largement utilisé dans les véhicules aériens sans pilote (UAV) ou les drones. Il fournit les données essentielles d'orientation et de cap nécessaires à un vol stable et à des manœuvres précises. En intégrant l'AHRS aux systèmes de pilote automatique, les UAV peuvent atteindre des capacités de vol autonomes, améliorant ainsi la fiabilité et l'efficacité des opérations de drones.
En robotique, les systèmes AHRS sont indispensables pour fournir des informations d'orientation et de cap aux robots mobiles et aux bras robotiques. Des données d'orientation précises sont essentielles pour les tâches qui nécessitent des mouvements et un positionnement précis. Cette capacité améliore considérablement la capacité des robots à naviguer et à effectuer des tâches complexes dans des environnements dynamiques.
Utilisation de capteurs de mouvement dans vos projets
Un AHRS est une technologie essentielle qui fournit des informations d’orientation et de cap précises et fiables pour diverses applications, notamment l’aviation, la navigation maritime, les UAV et la robotique.
En combinant les données des gyroscopes, des accéléromètres et des magnétomètres, il fournit des données d’orientation complètes et précises.
De plus, des algorithmes avancés de fusion de capteurs et de correction d’erreurs garantissent la précision et la fiabilité du système. À mesure que la technologie progresse, ces systèmes continueront de jouer un rôle crucial dans l’amélioration de la navigation et du contrôle dans de nombreux domaines.