Post-processing data refers to analyzing and correcting recorded data after a survey or mission ends. This method improves accuracy and reliability. In navigation and positioning systems, especially GNSS, post-processing removes noise and applies corrections to raw measurements. Engineers use post-processing to correct drift, reduce errors, and refine positioning results. It is especially useful in areas with poor satellite coverage or signal interruptions.
Post-processing relies on stored data. This includes GNSS satellite signals, inertial measurements, and base station corrections. Engineers process the data offline using specialized software. This software applies mathematical models to improve the final position or trajectory. The result is a more accurate path or set of measurements than what was obtained in real time.
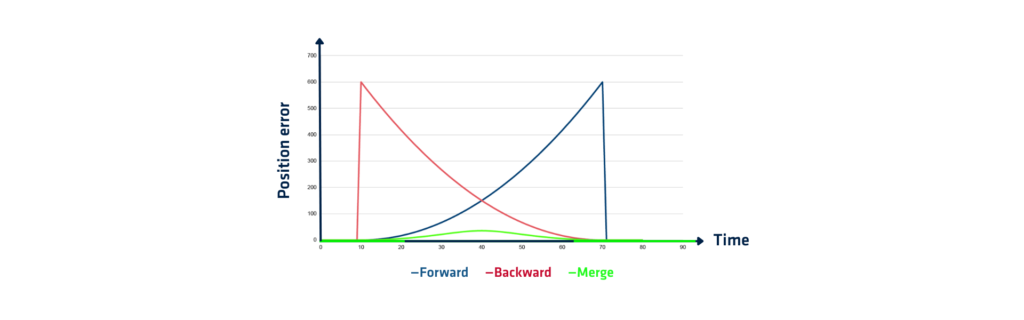
Backward, forward and merge processing
One major method in post-processing is forward processing. This involves analyzing data from the start of the mission to the end. The software uses initial conditions and measurements to estimate the position along the time sequence. This method is simple and fast. However, it may carry errors from the beginning throughout the entire data set.
Backward processing analyzes the data from the end of the mission to the beginning. This method uses final conditions to estimate earlier positions. It often gives more accurate results at the start of the survey. It helps correct initial errors that occurred in forward processing. Backward processing is especially useful when the system starts without good satellite coverage.
Merged processing combines forward and backward solutions. The software processes the data in both directions. It then merges the two trajectories into one optimized solution. This kind of processing gives the most reliable and accurate results. It balances initial and final conditions and minimizes the total error. Most high-end post-processing tools use this method by default.
Post-processing also includes techniques such as differential GNSS. This method uses data from a nearby base station with known coordinates. The system compares the rover’s data with the base’s data. It applies corrections to reduce satellite-related errors. Another common approach is tightly coupled GNSS/INS post-processing. It fuses satellite data with inertial sensor data to handle short outages and improve position stability.
Surveyors, engineers, and researchers rely on post-processing to achieve high precision. It is essential for mapping, hydrography, UAV flights, and scientific studies. Post-processing tools require careful calibration and correct time synchronization. Data quality depends heavily on sensor accuracy and proper data logging during the mission.
Qinertia GNSS+INS PPK software
Qinertia PPK software offers an all-new level in high-precision positioning solutions. Achieve unparalleled accuracy in your workflows by post-processing your raw location data.
Discover all features