A Multibeam Echosounder (MBES) is a sonar-based system that maps the seafloor by emitting multiple sound beams and recording their echoes. It uses high-frequency sound waves to scan wide swaths of the underwater environment, producing accurate, high-resolution, three-dimensional images.
MBES plays a vital role in modern hydrography, marine research, offshore engineering, and environmental monitoring. By sending out fan-shaped beams perpendicular to the vessel’s movement, MBES captures the contours and depths of the seafloor with exceptional precision.
The system consists of a transmitter that emits sound waves and an array of hydrophones that receive the reflected signals. These reflections, or echoes, bounce off the seabed and return to the vessel, where MBES sensors measure the time of travel. The system then calculates depth using the speed of sound in water and the round-trip time.
The principles of MBES – multibeam echosounder
The core technology of MBES uses beamforming to direct and narrow sound beams. This process increases accuracy and reduces ambient noise. Beamforming helps the system distinguish between objects placed close together. It also improves the resolution of seafloor imagery. These capabilities allow MBES to detect underwater hazards with high precision. MBES can also map geological features and ensure safe marine navigation. In hydrographic surveying, MBES plays a key role in accurate depth mapping.
Frequency determines survey depth and data precision. High-frequency systems produce detailed images but operate best in shallow waters. Low-frequency systems work in deeper environments but offer less detail. Many MBES models cover wide frequency ranges, such as 200–700 kHz. This range supports various applications with flexible survey needs.
Beamwidth defines the size of each sonar beam. Narrow beamwidth improves data precision and sharpness. High-frequency MBES models can achieve beamwidths as tight as 0.3 degrees. More sonar beams result in higher resolution coverage. Clients often require a set number of pings per area. Systems with many beams help meet those specifications effectively.
Swath coverage measures the sonar’s total viewing angle. A single-head MBES system may cover up to 130 degrees of seafloor. Dual-head systems extend this coverage by adjusting receiver angles. A wider swath increases area coverage in each pass. However, wider angles can reduce resolution and data quality at the edges.
Pulse length impacts both data resolution and range. Longer pulses penetrate deeper but reduce detail. Shorter pulses provide sharper images but work over shorter distances.
Choose the MBES system based on the required water depth. Some systems work best in shallow waters. Others are designed for deep-sea environments. High-resolution MBES mounted on AUVs or ROVs can collect fine detail at depth. Surface vessels may require lower-frequency systems to achieve long-range performance.
Environmental conditions also affect MBES performance. Temperature, salinity, and water pressure change how sound travels underwater. Survey planners must consider these variables before deployment. MBES performance also depends on ancillary sensors. Quality sensors for sound velocity, position, and orientation improve overall accuracy. They help correct for motion and minimize installation-related errors.
Verify that the MBES system works with your data processing software. Ensure the software can handle the volume and complexity of MBES data. Sufficient processing power ensures reliable, fast results. Compatibility between system and software improves efficiency and survey productivity.
Multibeam echosounder applications
Surveyors use it to collect detailed depth measurements for creating nautical charts and planning marine infrastructure. Accurate bathymetric data enables the identification of navigational hazards, the design of ports and harbors, and the definition of shipping routes. These surveys are critical to maritime safety and commerce. Marine researchers also rely on MBES to explore underwater ecosystems and geological formations. By mapping coral reefs, ocean ridges, and trenches, scientists gain insights into seafloor morphology and marine biodiversity. The high-resolution data supports studies of sediment movement, tectonic activity, and habitat distribution.
MBES helps researchers understand how the seafloor changes over time and how these changes affect marine life. In offshore engineering, MBES provides essential information for infrastructure development. Engineers use the system to assess seafloor conditions before installing oil rigs, wind turbines, or subsea pipelines. Accurate topographic data ensures that structures are built on stable ground and that construction does not damage the marine environment. MBES also supports ongoing inspection and maintenance by tracking changes around underwater installations.
Environmental monitoring is another key application of MBES – multibeam echosounder. The technology detects alterations in seafloor features caused by events such as earthquakes, landslides, or tsunamis. It also reveals the impact of human activities like dredging, trawling, and resource extraction. Governments and conservation groups use MBES data to manage marine ecosystems, enforce regulations, and plan restoration projects.
The success of MBES depends on several technological components. The sonar system uses transducers to emit and receive sound waves, typically in the 12 kHz to 400 kHz frequency range. Lower frequencies reach greater depths, while higher frequencies provide finer detail. These transducers are mounted on the hull of a ship or an underwater vehicle, depending on the survey area.
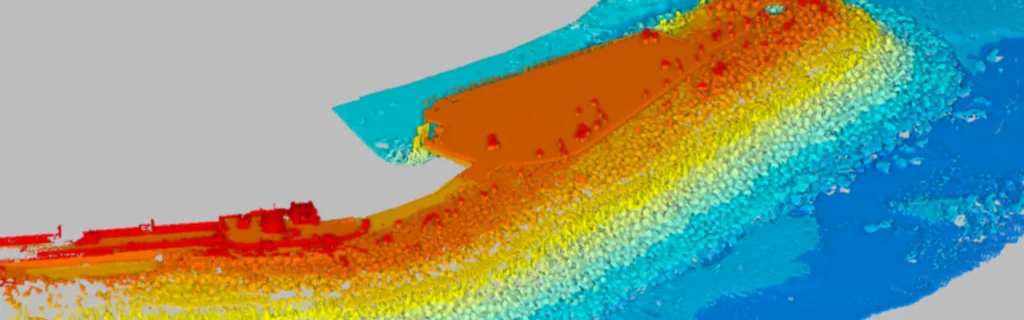
MBES data is processed using advanced software platforms such as CARIS, Hypack, and QPS. These programs clean, interpolate, and visualize the raw sonar data, transforming it into usable maps and 3D models. The software performs essential functions like beamforming, outlier removal, and surface creation to deliver reliable outputs. Positioning systems are critical for accurate MBES mapping.
GNSS systems, such as GPS, track the vessel’s location, while motion sensors and inertial measurement units (IMUs) correct for vessel movement. These corrections ensure that each sound beam’s position is correctly geo-referenced, maintaining spatial accuracy across the survey area. MBES continues to evolve with advancements in sonar hardware, real-time data processing, and integration with other navigation systems.
Newer models feature increased beam density, better noise suppression, and greater depth capabilities. As automation and machine learning enter the hydrographic field, MBES is becoming even more efficient and intelligent.