


AHRS – Attitude and Heading Reference System
Attitude & Heading Reference System (AHRS) is a crucial technology in modern aviation and maritime navigation. It provides essential information about an aircraft or vessel’s orientation and heading, ensuring safe and accurate navigation.
It’s also referred to as Motion Reference Units (MRU).
What is an attitude & heading reference system (AHRS)?
The Attitude & Heading Reference System (AHRS) is an integrated system that provides three-dimensional orientation data, including roll, pitch, and yaw angles, as well as heading information. This data is vital for pilots and navigators to maintain control and situational awareness. AHRS combines multiple sensors to deliver accurate and reliable orientation information.
Components of AHRS
AHRS typically comprises several key components:
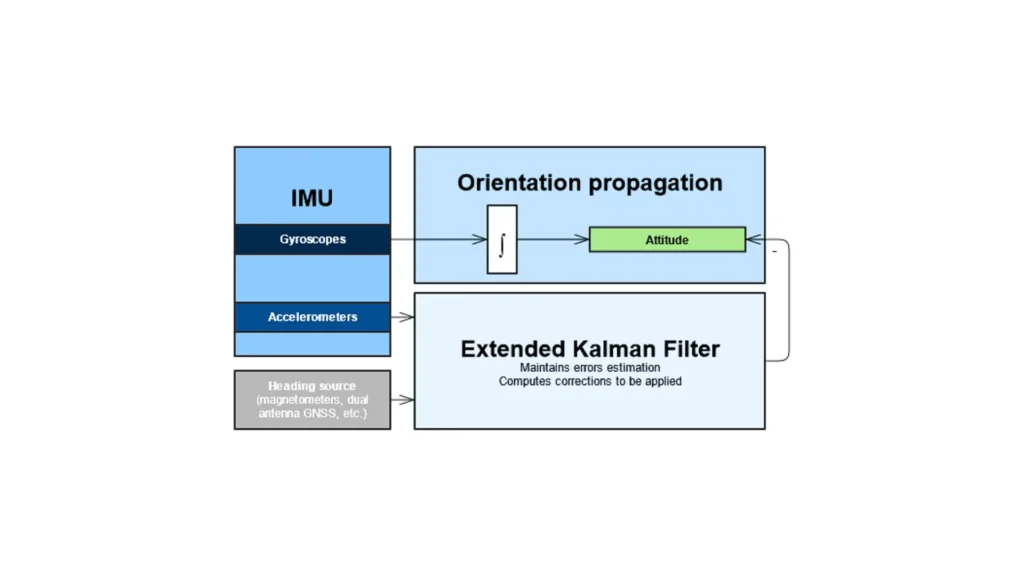
- Gyroscopes: Measure angular velocity around the three principal axes (roll, pitch, and yaw).
- Accelerometers: Measure linear acceleration, helping to determine the orientation relative to the Earth’s gravity.
- Magnetometers: Measure the Earth’s magnetic field to provide heading information.
- Microprocessors: Process sensor data to calculate precise orientation and heading information.
Importance of an AHRS
AHRS is essential for:
1 – Stability and Control: Ensuring the aircraft or vessel maintains the desired orientation and heading.
2 – Navigation: Providing accurate orientation data for precise navigation.
3 – Safety: Enhancing situational awareness and reducing the risk of disorientation.
AHRS combines data from gyroscopes, accelerometers, and magnetometers to provide comprehensive orientation and heading information. The system uses advanced algorithms to process sensor data and correct for errors and drift.
Range of applications
AHRS has a wide range of applications in aviation, maritime navigation, and other fields requiring precise orientation and heading information.
In aviation, AHRS is a critical component of modern avionics systems. It provides pilots with real-time information about the aircraft’s orientation and heading, enabling safe and accurate navigation. The data, displayed on the Primary Flight Display (PFD), enhances situational awareness and reduces pilot workload. Furthermore, the integration of motion sensors with autopilot systems allows for automated flight control and stability enhancement.
Similarly, in maritime navigation, AHRS plays a crucial role in providing orientation and heading information for ships and boats. It is especially valuable in rough sea conditions, where accurate orientation data is essential for maintaining stability and control. In these applications, AHRS helps with navigation, course plotting, and automatic steering systems.
Moreover, AHRS is widely used in unmanned aerial vehicles (UAVs) or drones. It provides the essential orientation and heading data needed for stable flight and precise maneuvering. By integrating AHRS with autopilot systems, UAVs can achieve autonomous flight capabilities, enhancing the reliability and efficiency of drone operations.
In robotics, AHRS systems are indispensable for providing orientation and heading information to mobile robots and robotic arms. Accurate orientation data is essential for tasks that require precise movements and positioning. This capability significantly enhances robots’ ability to navigate and perform complex tasks in dynamic environments.
Using motion sensors in your projects
An AHRS is a vital technology that provides accurate and reliable orientation and heading information for various applications, including aviation, maritime navigation, UAVs, and robotics.
By combining data from gyroscopes, accelerometers, and magnetometers, it delivers comprehensive and precise orientation data.
Moreover, advanced algorithms for sensor fusion and error correction ensure the system’s accuracy and reliability. As technology advances, these systems will continue to play a crucial role in enhancing navigation and control across multiple domains.
