Subsea navigation systems enable accurate underwater positioning where GNSS signals cannot reach. These systems prove vital for tasks like pipeline inspection, seabed mapping, underwater construction, and oceanographic research. Since seawater absorbs radio waves, subsea navigation relies on acoustic signals, inertial sensors, and real-time data fusion.
Operators use these systems on ROVs, AUVs, and manned submersibles to maintain control and ensure safety. Most solutions combine acoustic positioning with inertial navigation to guarantee robust, continuous tracking.
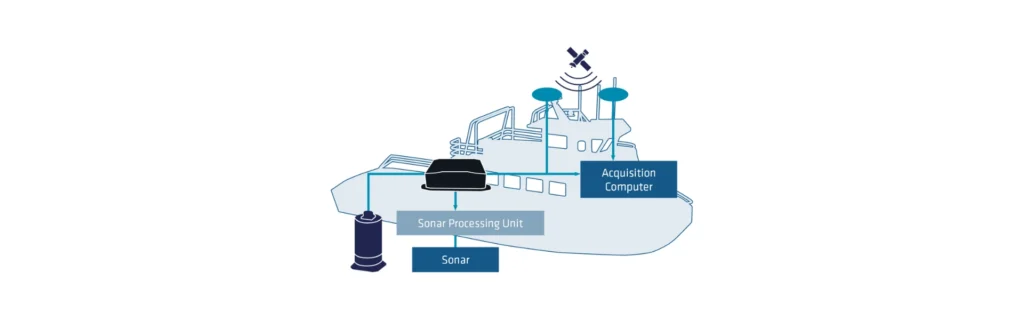
Acoustic techniques include USBL (Ultra-Short Baseline), SBL (Short Baseline), and LBL (Long Baseline). For example, USBL systems send acoustic pulses from a surface vessel to an underwater transponder. Then, they calculate the vehicle’s position by measuring the signal’s travel time and arrival angle. USBL is easy to deploy and ideal for dynamic missions. However, its accuracy declines at greater depths.
Meanwhile, LBL systems offer higher precision by using multiple transponders on the seafloor to form a reference grid. The vehicle measures its distance to each transponder to determine its location. This method provides excellent accuracy for long or deep missions. In contrast, SBL systems use multiple receivers on a single platform. They deliver a balance of range and precision.
Inertial Navigation Systems (INS) support acoustic positioning by tracking the vehicle’s motion. INS relies on accelerometers and gyroscopes to measure movement. The system integrates these readings to estimate position, orientation, and speed. This capability becomes useful when acoustic signals weaken or become unavailable.
Furthermore, operators often pair INS with Doppler Velocity Logs (DVLs) and pressure sensors to correct for INS drift over time. DVLs measure the vehicle’s velocity relative to the seafloor. They help stabilize position estimates and reduce error.
Together, these technologies form reliable subsea navigation systems for demanding marine operations. Thus, they ensure mission success and operator safety in complex underwater environments.
Presenting modern subsea navigation systems
Modern subsea navigation systems rely on sensor fusion to boost accuracy and reliability. Generally, they combine data from multiple sensors, including INS, DVL, depth sensors and acoustic systems.
Advanced algorithms, like Kalman filters or Bayesian estimators, integrate this information to deliver precise, real-time position estimates. These algorithms continuously correct the vehicle’s trajectory, improving resilience against sensor failure or environmental interference.
Subsea navigation supports many underwater operations. ROVs and AUVs use it to inspect pipelines, place equipment, and maintain subsea infrastructure. Marine scientists rely on AUVs to map the ocean floor, explore hydrothermal vents, and track marine species. Navies use precise underwater navigation for mine countermeasures, surveillance, and submarine missions. Search and recovery teams use it to locate and retrieve lost objects like aircraft wreckage or black boxes.
Environmental conditions challenge subsea navigation. Water temperature, salinity, and pressure affect sound travel and sensor performance. Strong currents, rugged seafloor, and low visibility complicate navigation. To address these issues, operators plan missions carefully, calibrate sensors, and use detailed bathymetric maps and environmental data.
Technology continues to improve subsea navigation. High-performance MEMS sensors, AI-powered algorithms, and fast acoustic modems increase capability and reduce uncertainty in complex underwater settings.
Reliable navigation is key for safe and accurate underwater missions. By fusing inertial, acoustic, and depth data, modern systems provide stable positioning even without GNSS. As underwater exploration expands, navigation systems will evolve to offer higher precision, deeper range, and more autonomy for next-generation vehicles.